모션과 경로 계획
매니퓰레이터는 RRT(Rapidly exploring Random Tree), CHOMP(Covariant Hamiltonian Optimization for Motion Planning) 알고리즘 같은 사용자 지정 가능한 플래너를 사용하고 이동 로봇은 PRM(probabilistic roadmap: 확률적 로드맵)을 사용하여 경로를 계획합니다. Navigation Toolbox™를 활용하여 사용자 지정 가능한 모션 플래너를 설계합니다.
장애물을 피하면서 전역 경로를 따라 부드럽게 움직이는 궤적을 생성합니다.
카테고리
추천 예제
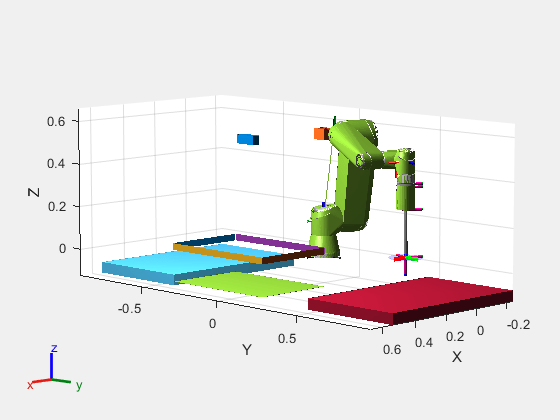
Design a Trajectory Planner for a Robotic Manipulator
Design a planner in Simulink that generates collision-free trajectories for sorting items in a bin picking system.

Pick-And-Place Workflow Using CHOMP for Manipulators
Use CHOMP to plan smooth and collision-free trajectories for a pick-and-place workflow.

차동 구동 로봇의 경로 추종
Pure Pursuit 경로 추정 제어기를 사용해 미리 지정된 경로를 따라 시뮬레이션 로봇을 구동합니다.
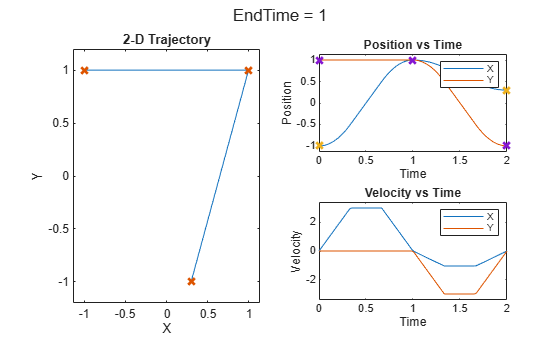
Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.

Plan Path in Warehouse Scenario with Unseen Obstacle Avoidance
Plan path in a warehouse scenario by avoiding unseen obstacles using TEB algorithm.

Simulate Path Following on Speedgoat Real-Time Target Machine
Perform real-time simulation of path following on Speedgoat real-time target machine.
교육 관련 자료

로봇 매니퓰레이터
좌표계 변환, DH 파라미터, 정기구학/역기구학을 통해 로봇 팔 모션의 개념을 알아봅니다.