궤적 생성
다음 함수들은 각기 다른 수학 방정식을 사용하여 매니퓰레이터 로봇의 궤적을 생성합니다. 다항식, B-스플라인, 사다리꼴 속도 프로파일로 다중 자유도(DOF) 시스템의 궤적을 생성할 수 있습니다. 회전 행렬과 동차 변환 사이를 보간할 수도 있습니다.
여러 예제를 통해 형태 추적과 픽앤플레이스 워크플로에서 계획, 제어, 시뮬레이션을 비롯한 궤적 실행의 다양한 응용 사례를 소개합니다.
함수
블록
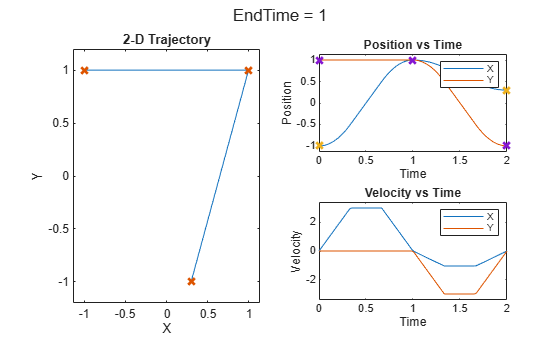
| Polynomial Trajectory | 웨이포인트를 통과하는 다항식 궤적 생성 |
| Rotation Trajectory | Generate trajectory between two orientations |
| Transform Trajectory | Generate trajectory between two homogeneous transforms |
| Trapezoidal Velocity Profile Trajectory | Generate trajectories through multiple waypoints using trapezoidal velocity profiles |
| Minimum Jerk Polynomial Trajectory | Generate minimum jerk polynomial trajectories through multiple waypoints (R2022a 이후) |
| Minimum Snap Polynomial Trajectory | Generate minimum snap polynomial trajectories through multiple waypoints (R2022a 이후) |
도움말 항목
- Choose Trajectories for Manipulator Paths
Explore and compare different manipulator trajectory types by generating paths for these trajectory profiles.
- Generate Time-Optimal Trajectories with Constraints Using TOPP-RA Solver
Generate trajectories within velocity and acceleration limits using TOPP-RA solver for time-optimal path planning.
- Manipulator Shape Tracing in MATLAB and Simulink
Generate a smooth 3-D path for Sawyer robot end-effector by tracing predefined 3-D shapes.
추천 예제
Perform Safe Trajectory Tracking Control Using Robotics Manipulator Blocks
Achieve safe trajectory tracking control of a simulated robot using manipulator algorithm blocks in Simulink®.

로봇 팔의 최소 저크 궤적 계획하기
장애물을 탐색하는 로봇 팔의 최소 저크 궤적을 계획하고 시각화합니다.
Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.

Kinova Gen3 매니퓰레이터를 사용하여 작업-공간 궤적과 조인트-공간 궤적을 계획하고 실행하기
Kinova® Gen3 매니퓰레이터를 사용하여 원하는 엔드 이펙터 자세로 이동하도록 보간된 조인트 궤적을 생성하고 시뮬레이션합니다.

Model and Control a Manipulator Arm with Robotics and Simscape
Design YuMi robot algorithms in Simulink and simulate in Simscape™, emphasizing algorithm precision and system modeling.