Navigation Toolbox
Navigation Toolbox™는 센서 모델링 및 보정, 모션 계획, SLAM(동시적 위치추정 및 지도작성), 관성 항법을 위한 알고리즘과 분석 툴을 제공합니다. 또한 이 툴박스는 위치추정을 위한 센서 모델과 알고리즘을 제공합니다. 이를 통해 IMU, GPS, 휠 인코더 센서 데이터를 시뮬레이션하고 시각화할 수 있으며 다중 센서 자세 추정을 위해 융합 필터를 조정할 수 있습니다.
이 툴박스에는 사용자 지정 가능한 탐색 기능과 샘플링 기반 경로 플래너뿐만 아니라 경로 검증과 비교를 위한 메트릭도 들어 있습니다. 2차원 맵 표현과 3차원 맵 표현을 만들고, SLAM 알고리즘을 사용하여 맵을 생성하고, SLAM 맵 작성기 앱을 통해 맵 생성을 대화형 방식으로 시각화하고 디버그할 수 있습니다.
항공기, 자율주행, 로보틱스, 가전제품 응용 분야에 대한 참조 예제가 제공됩니다. 내비게이션 알고리즘을 하드웨어에 직접 배포하여 내비게이션 알고리즘을 테스트할 수 있습니다(MATLAB® Coder™ 또는 Simulink® Coder 사용).
Navigation Toolbox 시작하기
Navigation Toolbox의 기본 사항 배우기
좌표 변환과 궤적
쿼터니언, 회전 행렬, 변환, 궤적 생성
센서 모델
IMU, GPS, 거리 센서에 대한 시뮬레이션 및 보정
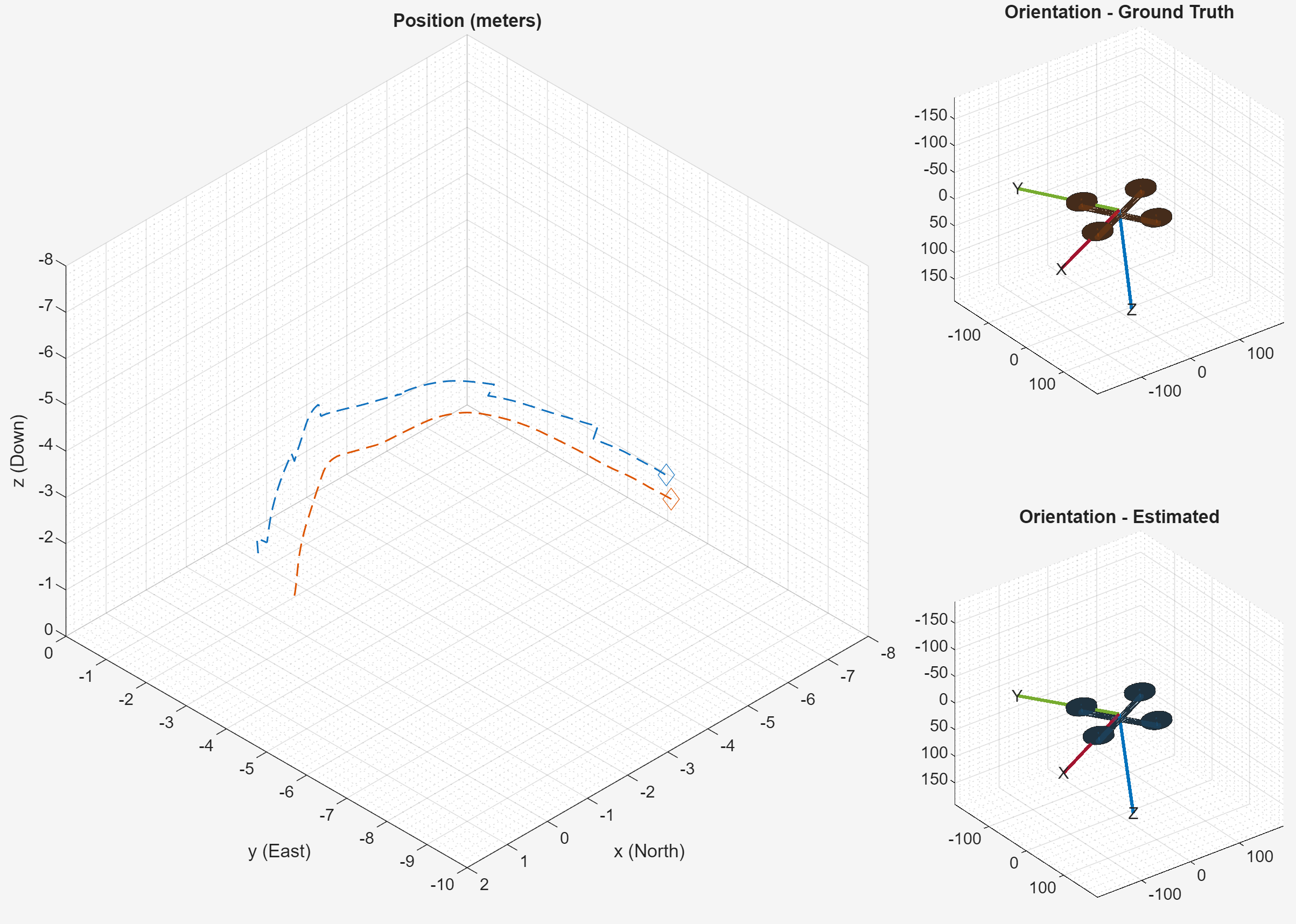
관성 센서 융합
IMU 및 GPS, 센서 융합, 사용자 지정 필터 조정을 통한 관성 항법
GNSS 측위
GNSS 데이터를 사용한 위치 추정
위치추정 알고리즘
입자 필터, 스캔 매칭, 몬테카를로 위치추정, 자세 그래프, 오도메트리
맵 작성
2차원 점유 맵 및 3차원 점유 맵, 자기중심적 맵, 레이캐스팅
SLAM
2차원 및 3차원 동시적 위치추정 및 지도작성
모션 계획
전역 및 로컬 경로 계획, 경로 추종, 장애물 회피, 경로 메트릭
코드 생성과 배포
알고리즘 가속화를 위한 C/C++ 코드 및 MEX 함수 생성