이동체 시스템
예제를 통해 자동차, 해운, 항공우주 시스템을 위한 머신 및 제어를 구현하는 방법을 알아봅니다.
추천 예제
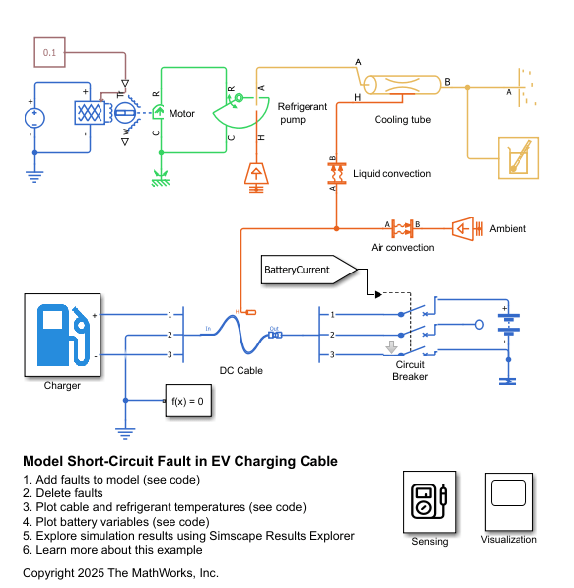
Model Short-Circuit Fault in EV Charging Cable
Model and prevent a short-circuit fault in the connectors of an electric vehicle (EV) charging cable. First, you examine the system under normal operating conditions with effective refrigerant cooling and a constant-current (CC), constant-voltage (CV) charging strategy. Then, you introduce an open-circuit fault in the motor of the refrigeration system. This fault causes the cable to overheat, resulting in the short-circuit fault in the cable connectors. Finally, you regulate the current to enable passive cooling and safer battery charging without relying only on the refrigeration system.
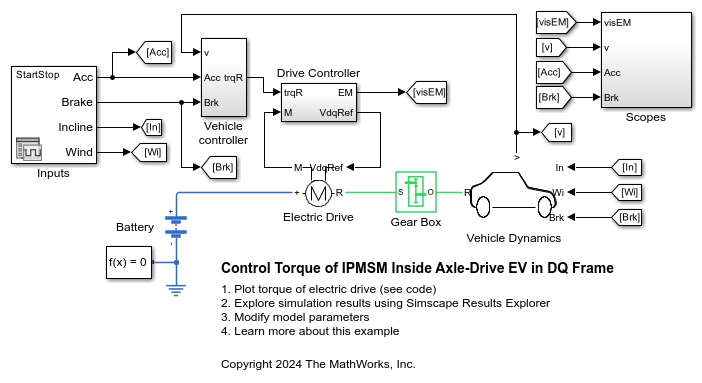
DQ 프레임에서 차축-드라이브 EV 내의 IPMSM의 토크 제어하기
이 예제에서는 단순화된 차축-드라이브 전기차를 추진하는 매립형 영구 자석 동기기(IPMSM)를 모델링합니다. 이 예제에서는 회전자 DQ(직접 직교) 기준 프레임에서 토크를 제어하고 시뮬레이션합니다. IPMSM은 모터 모드와 발전기 모드 모두에서 작동합니다. 고정 비율 기어 감속 모델은 차량 변속기와 차동 기어를 구현합니다. Vehicle Controller 서브시스템은 드라이버 입력값을 관련 토크 명령으로 변환합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. 제어 알고리즘은 연속시간으로 구현됩니다. 이 모델을 더 빠르게 시뮬레이션하기 위해 이 예제에서는 가변 스텝 솔버를 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
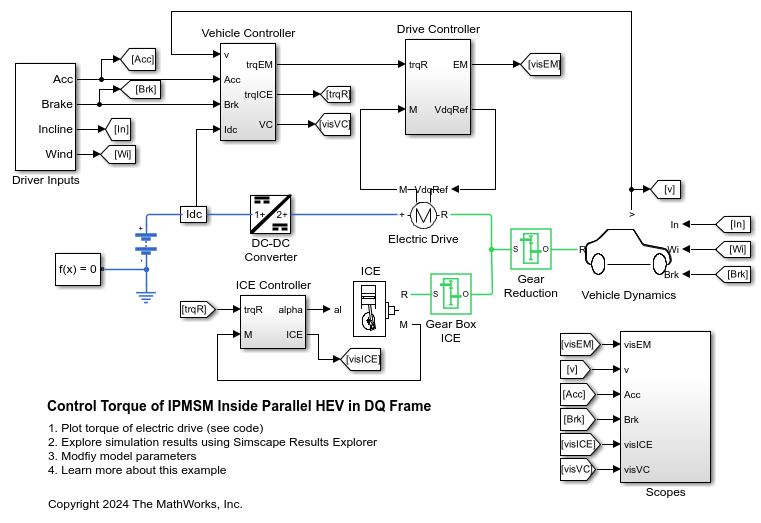
Control Torque of IPMSM Inside Parallel HEV in DQ Frame
Models a simplified parallel hybrid electric vehicle (HEV). An interior permanent magnet synchronous machine (IPMSM) and an internal combustion engine (ICE) provide the vehicle propulsion. This example controls and simulates the torque in the rotor direct-quadrature (DQ) reference frame. The IPMSM operates in both motoring and generating modes. A fixed-ratio gear-reduction model implements the vehicle transmission and differential. The Vehicle Controller subsystem converts the driver inputs into torque commands. A Stateflow® chart implements the vehicle control strategy. The ICE Controller subsystem controls the torque of the combustion engine. The EM Controller subsystem controls the torque of the IPMSM. To simulate this model faster, this example uses a variable-step solver. The Scopes subsystem contains scopes that allow you to see the simulation results.

Automotive Alternator Charging a Battery
How alternator behavior can be abstracted to a DC model that simulates efficiently. This test harness first ramps the alternator speed linearly from zero to a typical idle speed of 900 RPM. When the generated voltage is sufficient to overcome the forward voltage drop associated with the rectifier diodes, the battery charging current starts to ramp up. The test harness then ramps up the speed to 5000 RPM, and the alternator has to back off the field voltage to maintain the regulated voltage. The model captures the increase in stator resistance as the alternator heats up, this reducing device performance
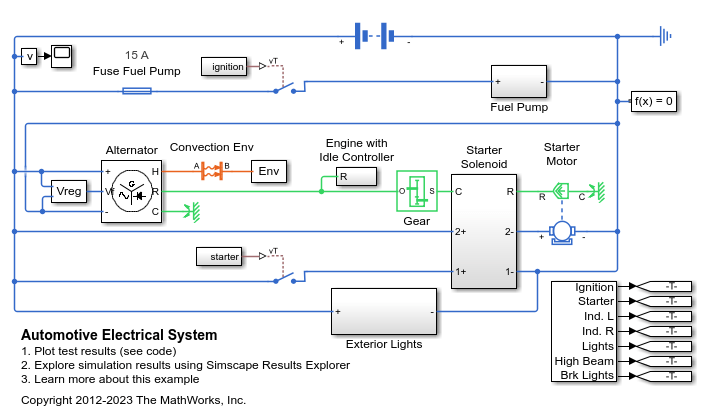
자동차 전기 시스템
이 예제에서는 자동차 전기 시스템의 단순화된 동적 모델을 보여줍니다. 이 모델은 전기 시스템, 기계 시스템, 열 시스템을 포함하며 엔진 시동이 전기 네트워크에 미치는 영향을 시뮬레이션할 수 있습니다.

전기차용 DC 고속 충전기
이 예제에서는 전기차(EV)의 배터리 팩과 연결된 DC 고속 충전소를 모델링합니다.

태양광 열병합을 사용하는 전기차용 DC 고속 충전소
이 예제에서는 전기차(EV)의 배터리 팩 3개와 연결된 태양열 열병합을 사용하는 DC 고속 충전소를 모델링합니다.
Detailed Battery Electric Vehicle (BEV) Model
Design a battery electric vehicle (BEV) using high-fidelity models of vehicle components. You can use this model to perform detailed analysis at the component level. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.

전기 엔진 다이노
이 예제에서는 전기차 동력계 테스트를 모델링하는 방법을 보여줍니다. 테스트 환경에는 기계 샤프트를 통해 연이어 연결된 비동기기(ASM)와 매립형 영구 자석 동기기(IPMSM)가 포함되어 있습니다. 고전압 배터리가 제어된 3상 컨버터를 통해 이 두 머신에 전력을 공급합니다. 164kW ASM은 부하 토크를 생성합니다. 35kW IPMSM은 테스트 대상 전기 기기입니다. Control Machine Under Test(IPMSM) 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Control Load Machine(ASM) 서브시스템은 싱글레이트를 사용하여 ASM의 속도를 제어합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

전력 보조 조향
이 예제에서는 전력 보조 자동차 조향 장치에서 운전자가 가하는 힘을 증대하기 위해 영구자석 동기모터(PMSM)를 사용하는 방법을 보여줍니다.

HIL을 위해 구성된 전기차
HIL(Hardware-In-the-Loop) 배포에 적합한 전기차 모델을 모델링합니다.

Energy Balance in a 48V Starter Generator
An interior permanent magnet synchronous machine (IPMSM) used as a starter/generator in a simplified 48V automotive system. The system contains a 48V electric network and a 12V electric network. The internal combustion engine (ICE) is represented by basic mechanical blocks. The IPMSM operates as a motor until the ICE reaches the idle speed and then it operates as a generator. The IPMSM supplies power to the 48V network, which contains the R3 power consumer. The 48V network supplies power to the 12V network which has two consumers: R1 and R2. The total simulation time (t) is 0.5 seconds. At t = 0.05 seconds, the ICE turns on. At t = 0.1 seconds, R3 switches on. At t = 0.3 seconds, R2 switches on and increases the load on the 12V electric network. The EM Controller subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The DCDC Controller subsystem implements a simple PI controller for the DC-DC Buck converter, which feeds the 12V network. The Scopes subsystem contains scopes that allow you to see the simulation results.

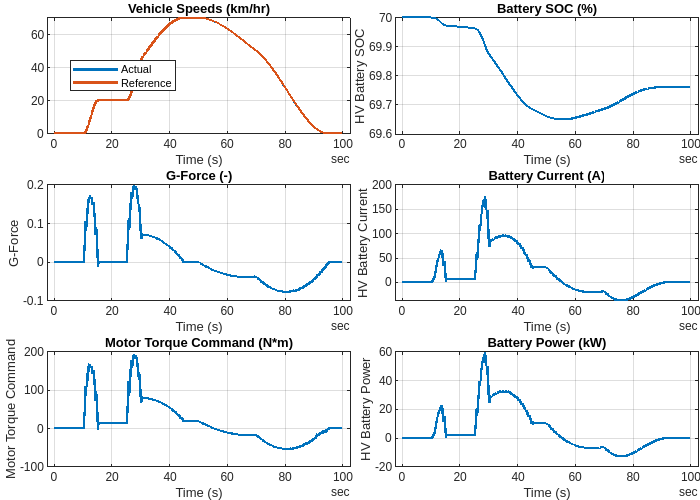
HEV(하이브리드 전기차) 모델
이 예제에서는 단순한 규칙 기반 컨트롤러를 사용하여 속도 추적 시뮬레이션을 위한 동력분기식 HEV(하이브리드 전기차)를 모델링하는 방법을 보여줍니다. 이 모델은 MATLAB®에서 다운로드하거나 MATLAB Central File Exchange와 GitHub®에서 액세스할 수 있습니다.
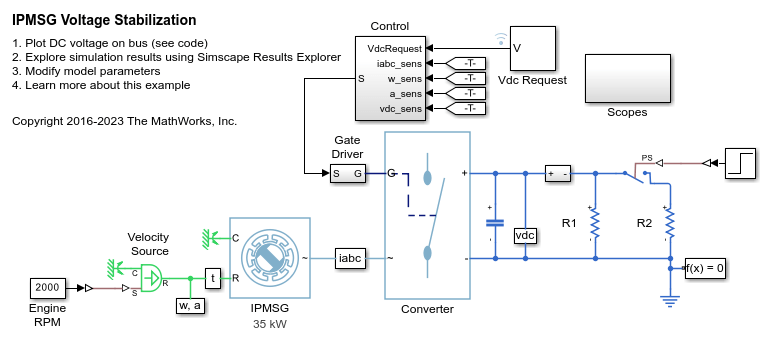
IPMSG Voltage Stabilization
Control an Interior Permanent Magnet Synchronous Generator (IPMSG) based low voltage generator system for a hybrid electric vehicle (HEV). The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results. An ideal angular velocity source, which represents a combustion engine, drives the IPMSG. The IPMSG supplies low-voltage power to loads R1 and R2. At t = 0.4 seconds, the switch closes, increasing the load.

직렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 직렬 HEV(하이브리드 전기차)를 추진하는 IPMSM(매립형 영구 자석 동기기)을 보여줍니다. 고전압 배터리에 연결된 이상적인 DCDC 컨버터는 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. 연소 기관으로 구동되는 발전기가 고전압 배터리를 충전합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 운전자 입력을 IPMSM과 발전기에 대한 명령으로 변환합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

직렬-병렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 직렬-병렬 하이브리드 전기차(HEV)를 보여줍니다. IPMSM(내부 영구 자석 동기기)과 ICE(내연 기관)는 차량에 추진력을 제공합니다. ICE는 또한 전기 발전기를 사용하여 주행 중에 고전압 배터리를 충전합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 토크 명령으로 변환합니다. 차량 제어 전략은 Stateflow® 상태 머신으로 구현됩니다. ICE Controller 서브시스템은 내연 기관의 토크를 제어합니다. Generator Controller 서브시스템은 전기 발전기의 토크를 제어합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

차축-드라이브 EV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 차축-드라이브 전기차를 추진하는 매립형 영구 자석 동기기(IPMSM)를 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 모터 모드와 발전기 모드 모두에서 작동합니다. 차량 변속기 및 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 이에 대응하는 토크 명령으로 변환합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

병렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 병렬 하이브리드 전기차(HEV)를 보여줍니다. IPMSM(내부 영구 자석 동기기)과 ICE(내연 기관)는 차량에 추진력을 제공합니다. IPMSM은 모터 모드와 발전기 모드 모두에서 작동합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 토크 명령으로 변환합니다. 차량 제어 전략은 Stateflow® 상태 머신으로 구현됩니다. ICE Controller 서브시스템은 내연 기관의 토크를 제어합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

선박의 완전 전기 추진 전력 시스템
이 예제에서는 기본 부하, 호텔 부하, 선수 추진기, 전기추진을 갖추고 있는 대표적인 선박 반선(Half-Ship) 전력 시스템을 보여줍니다.
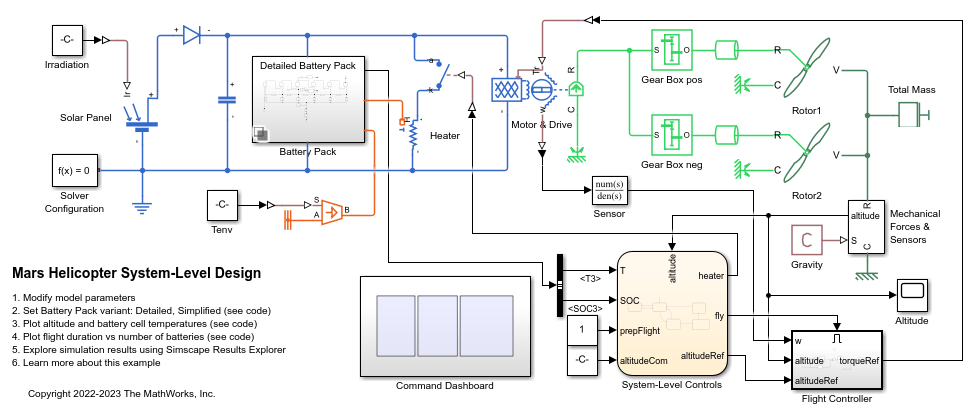
Mars Helicopter System-Level Design
Use Simscape™ Electrical™ to model a helicopter with coaxial rotors suitable to fly on Mars. This helicopter takes inspiration from Ingenuity, the robotic helicopter developed by NASA, which accomplished the first powered flight on another planet.
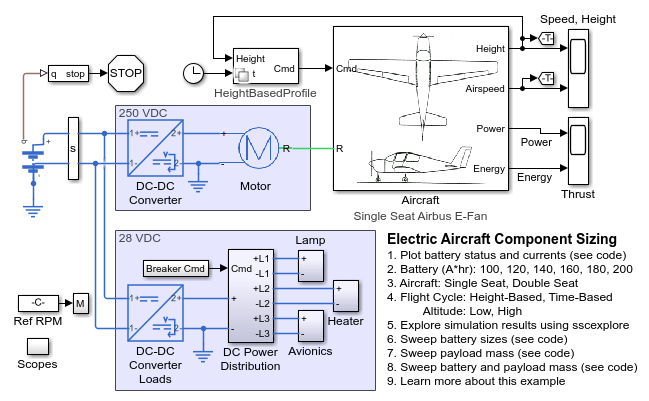
Model Electric and Hybrid Electric Aircraft
Evaluate architectures of electric and hybrid electric aircraft against design criteria like flight range and maximum flight time. You can modify many aspects of the design, including the battery size and payload. Electric aircraft is an active area of development in the aerospace industry. You can then select the power network architectures and size the components, based on the results of your analysis. You can also reduce the number of design iterations you need to meet system-level design requirements, by using parameter sweeps.
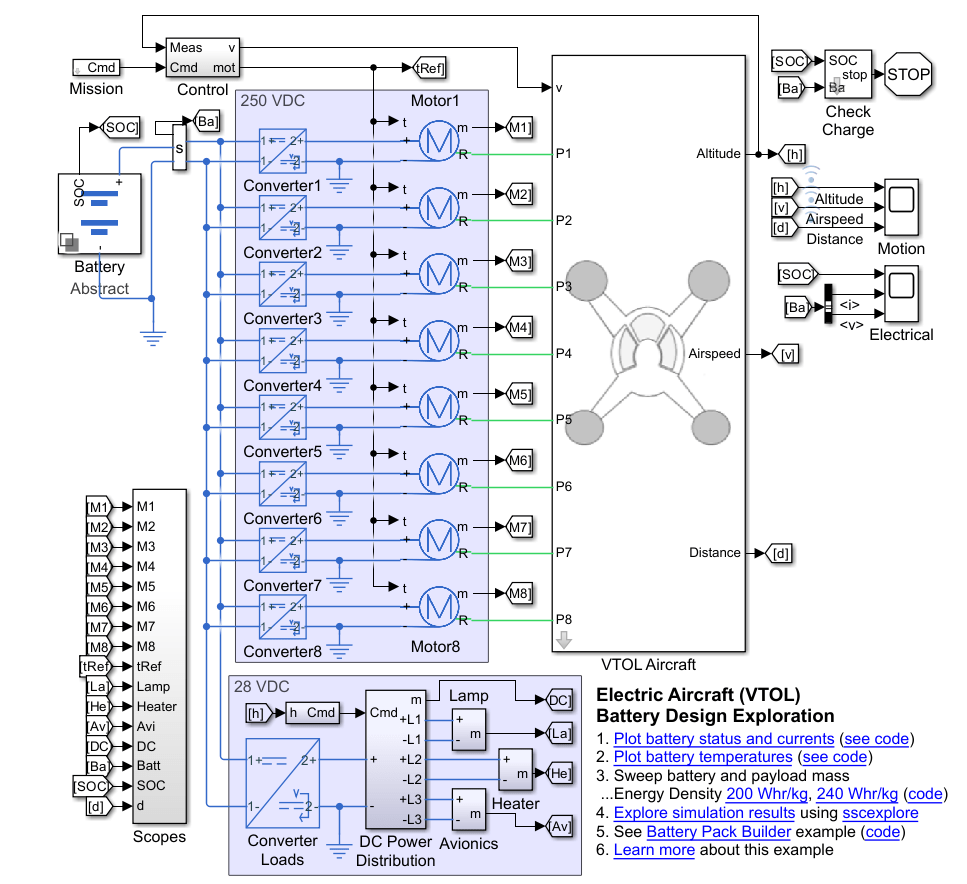
Model Electric VTOL Aircraft Battery Pack
Model an electric vertical takeoff and landing (VTOL) aircraft and design the battery pack. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.
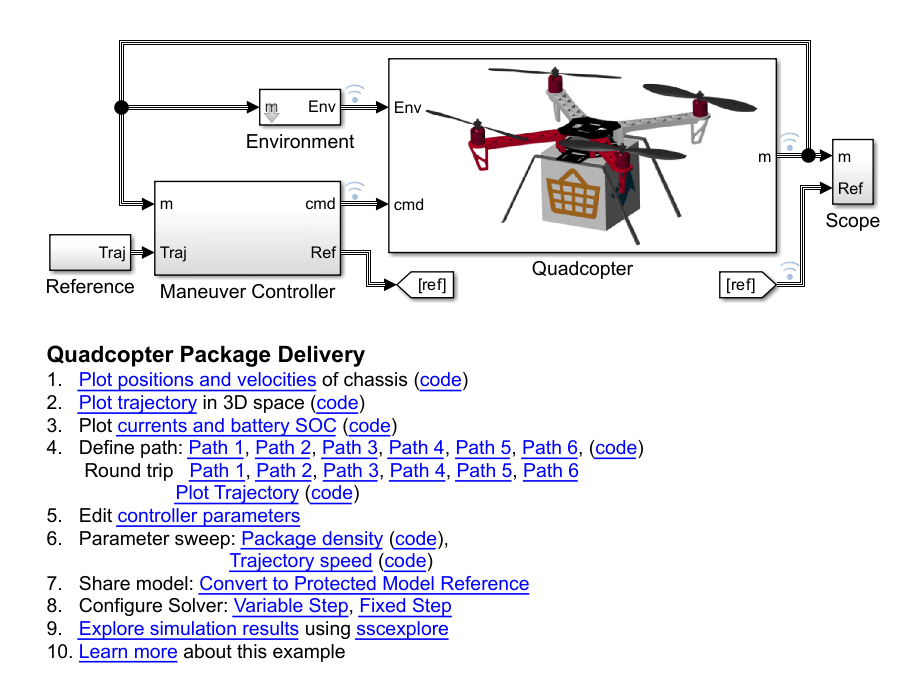
쿼드콥터 드론 모델링하기
이 예제에서는 소포 배송 경로를 탐색하는 쿼드콥터를 모델링하는 방법을 보여줍니다. 이 모델은 MATLAB®에서 다운로드하거나 MATLAB Central File Exchange와 GitHub®에서 액세스할 수 있습니다.
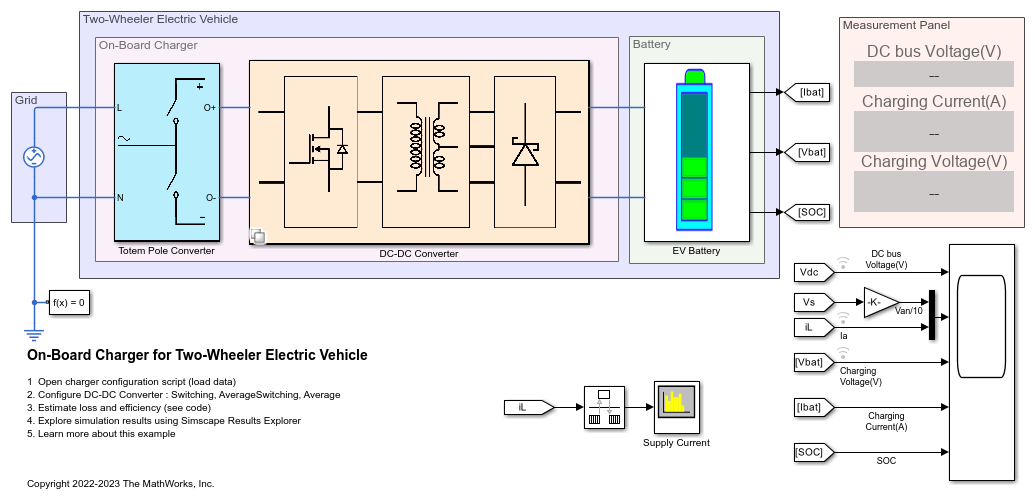
On-Board Charger for Two-Wheeler Electric Vehicle
Model an on-board charger for a two-wheeler vehicle by using an AC-DC converter and a DC-DC converter to achieve unity power factor (UPF) operation and constant current (CC) battery charging.
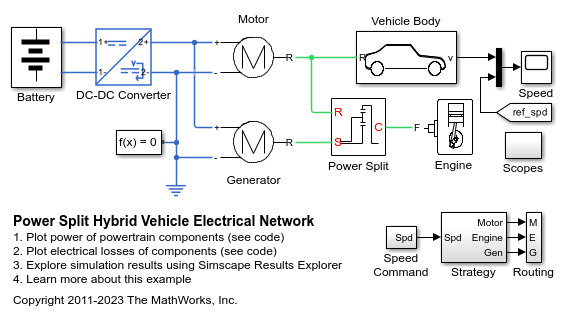
동력분기식(Power Split) 하이브리드 차량의 전기 네트워크
이 예제에서는 동력분기식(power-split) 하이브리드 변속의 기본 아키텍처를 보여줍니다. 모터 및 발전기와 함께 유성 기어는 가변비 기어처럼 동작합니다. 이 테스트에서 차량은 15m/s에서 20m/s까지 가속한 다음 다시 15m/s로 감속합니다. 전력 관리 전략에서는 기동 수행 시에 전력만 사용합니다.
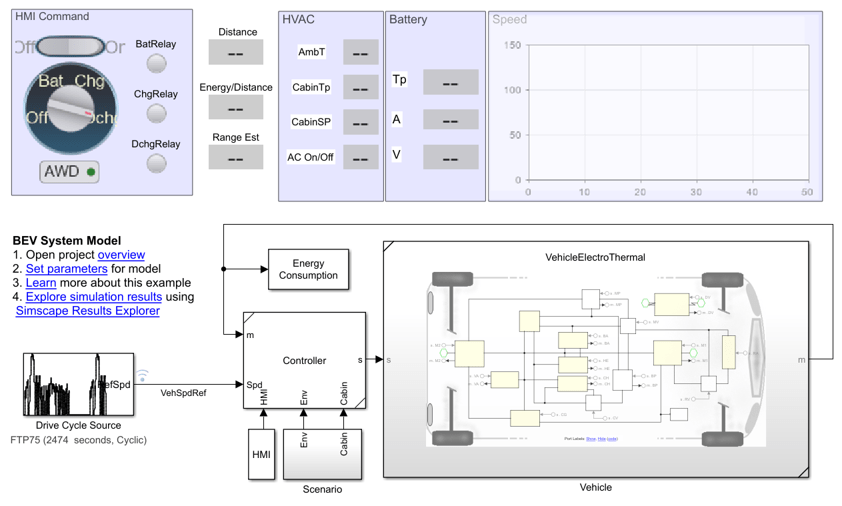
시스템 수준 배터리 전기차(BEV) 모델
이 예제에서는 차량 컴포넌트들의 추상 모델을 사용하여 배터리 전기차를 설계하는 방법을 보여줍니다. 전기 효율성과 같은 차량 수준 파라미터를 추정하는 데 사용할 수 있는 간단하고 빠른 실행 모델입니다. 이 모델은 MATLAB®에서 다운로드하거나 MATLAB Central File Exchange와 GitHub®에서 액세스할 수 있습니다.