쿼드콥터 드론 모델링하기
이 예제에서는 소포 배송 경로를 탐색하는 쿼드콥터를 모델링하는 방법을 보여줍니다. 이 모델은 MATLAB®에서 다운로드하거나 MATLAB Central File Exchange와 GitHub®에서 액세스할 수 있습니다.
예제 개요
이 예제에서는 다음을 수행하는 방법을 배웁니다.
소비 전류와 드론 범위 추정하기.
섀시와 프로펠러의 CAD 파일을 사용하여 기계 시스템 모델링하기.
종속 연결 PID(비례-적분-미분) 제어기를 사용하여 모터 속도 조정을 통해 고도와 자세 제어하기.
경로 추종과 속도 제어기를 사용하여 하이 레벨 명령 제공하기.
날씨 데이터베이스에 대한 Python® 쿼리를 사용하여 위치별 바람 상태 얻기.
돌풍 프로파일을 사용하여 드론 제어기의 안정성 테스트하기.
MATLAB 앱에서 수익성 분석을 사용하여 기술과 비즈니스 상충관계 살펴보기.
Parallel Computing Toolbox™가 있는 경우 파라미터 스윕을 사용하여 다음을 수행할 수도 있습니다.
소포의 질량을 변경하여 쿼드콥터 궤적에 미치는 영향 확인하기.
쿼드콥터의 목표 속도를 변경하여 쿼드콥터가 목표 경로를 추종할 수 있는지 확인하기.
쿼드콥터의 바디를 CAD로 설계하고 모델을 Simscape™ Multibody™로 가져올 수 있습니다. 빠른 시뮬레이션이 가능하도록 전기 모터는 전력 변환의 동특성을 추상적인 방식으로 나타냅니다. 쿼드콥터가 최종 웨이포인트에 도달하고 드론이 일련의 릴리스 기준을 충족하면 소포가 릴리스됩니다. 이 예제에 대한 자세한 내용은 웹 브라우저에서 열리는 개요를 다음 단계에 따라 살펴보거나 Quadcopter Drone Model in Simscape (MATLAB Central File Exchange)를 참조하십시오.
파일 다운로드하기
gitclone 함수를 사용하여 현재 폴더의 최신 리포지토리를 복제합니다.
gitclone("https://github.com/mathworks/Quadcopter-Drone-Model-Simscape");또는 다음 옵션 중 하나를 선택합니다. 다음 옵션을 사용하면 이전 MATLAB 릴리스와 호환되는 프로젝트의 최신 파일과 개별 버전을 다운로드할 수 있습니다.
Quadcopter Drone Model in Simscape (MATLAB Central File Exchange)에서 이 프로젝트의 ZIP 파일을 다운로드합니다.
Quadcopter Drone Model in Simscape (GitHub)에서 Git™ 리포지토리를 복제합니다.
프로젝트 열기
gitclone 함수를 사용한 후에는 MATLAB이 현재 폴더에 새 폴더를 만듭니다. 이 예제에서는 프로젝트를 사용하여 지원 파일을 관리합니다. Quadcopter_Drone 프로젝트 파일을 엽니다. 열려 있는 프로젝트가 있는 경우 MATLAB은 이 프로젝트를 불러오기 전에 열린 프로젝트를 닫습니다. 모델에는 수백 개의 지원 파일이 있으므로 프로젝트 환경을 구성하는 데는 몇 분 정도 걸립니다. 최상위 모델 캔버스에서 자세히 알아보기 하이퍼링크를 클릭하면 서브시스템과 모델 구성을 탐색하는 데 도움이 되는 개요가 웹 브라우저에서 열립니다. 개요는 주요 시뮬레이션 결과도 보여줍니다.
openProject("Quadcopter-Drone-Model-Simscape");프로젝트 탐색하기
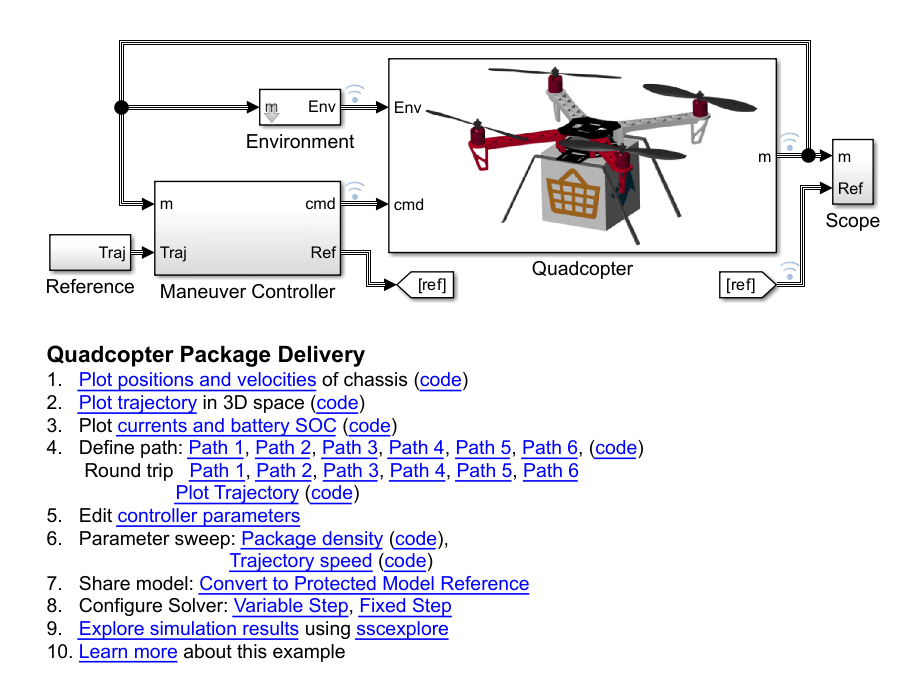
쿼드콥터 및 제어 시스템
최상위 모델은 쿼드콥터와 제어 시스템을 보여줍니다. 캔버스에서 하이퍼링크를 클릭하여 섀시의 위치와 속도를 플로팅하고 궤적을 3차원 공간에 플로팅합니다. 배터리를 통과하는 전류와 배터리 SOC(충전 상태)를 플로팅할 수도 있습니다.
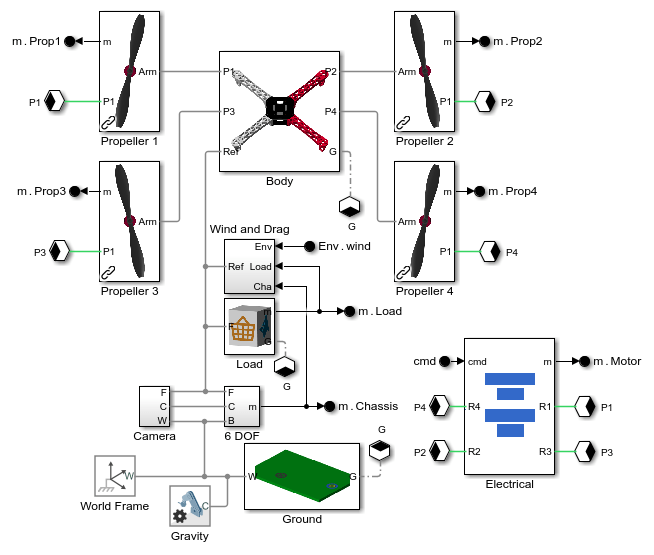
쿼드콥터 기계 시스템 및 전기 시스템
Quadcopter 서브시스템의 마스크 내부를 탐색합니다. 이 서브시스템은 바디와 프로펠러를 모델링하고 쿼드콥터에 작용하는 힘을 모델링합니다.
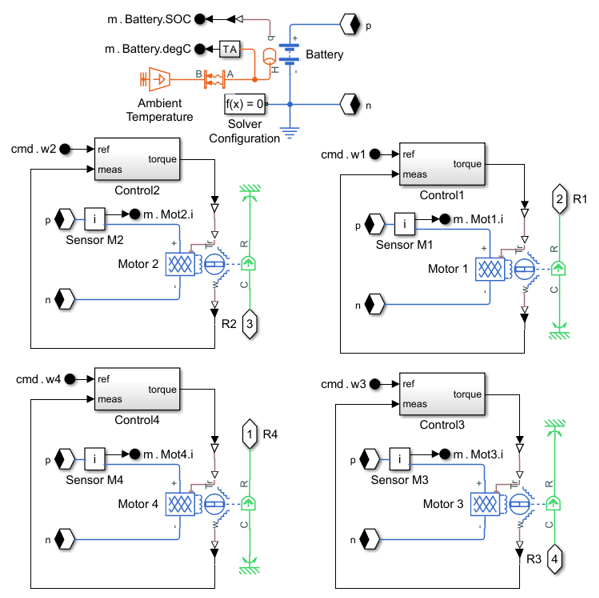
쿼드콥터 모터 및 배터리
Quadcopter 서브시스템 내부에 있는 Electrical 서브시스템의 마스크 내부를 탐색합니다. 이 서브시스템은 모터와 배터리를 모델링합니다.
MathWorks Simscape 팀이 제공하는 최신 예제를 확인하려면 MATLAB Central에서 MathWorks Simscape Team을 참조하십시오.