로보틱스 및 메카트로닉스
예제를 통해 모터를 제어하고, 모터의 특성을 비교하고, 전기 액추에이터를 개발하는 방법을 알아봅니다.
추천 예제

브러시리스 DC 모터
이 예제에서는 데이터시트 정보를 기반으로 브러시리스 DC 모터(즉, 서보모터)의 시스템 수준 모델을 구축하고 파라미터화할 수 있는 방법을 보여줍니다. 모터와 드라이버는 마스크 처리된 단일 서브시스템으로 모델링됩니다. Simulink®에서 모델을 보는 경우, Motor and Driver 블록을 선택하고 Ctrl+U를 입력하여 마스크 아래를 탐색하고 모델 구조를 확인합니다.

Compound Motor Design Optimization
Find design parameters that optimize a compound motor torque-speed curve to match the desired curve.
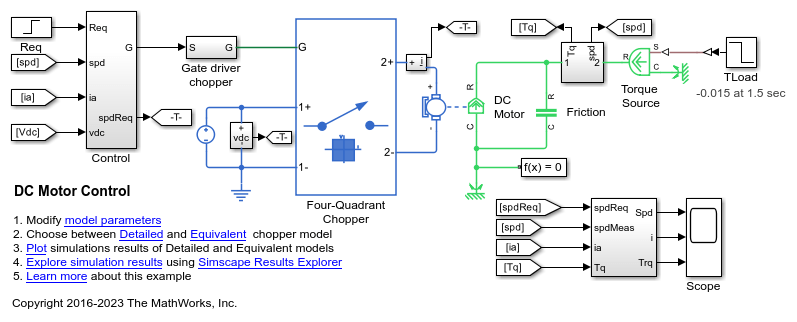
DC 모터 제어
이 예제에서는 DC 모터에 대한 캐스케이드 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 바깥쪽 속도-제어 루프, 안쪽 전류-제어 루프, PWM 생성이 포함됩니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.

DC 모터 제어(진상-지상)
이 예제에서는 DC 모터에 대한 진상-지상 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 진상-지상 제어기, 상수 이득, PWM 생성이 포함됩니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.
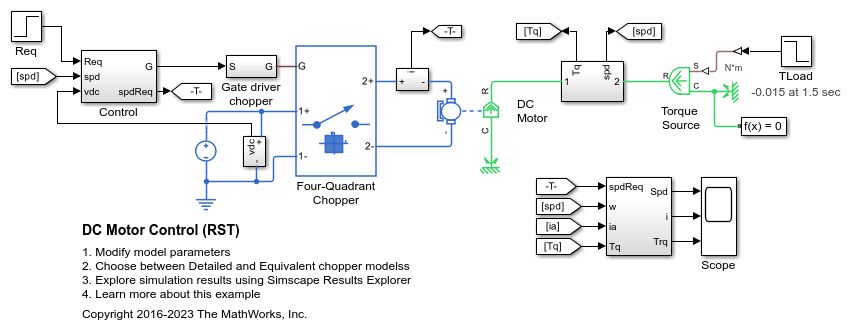
DC 모터 제어(RST)
이 예제에서는 DC 모터에 대한 RST 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 제어 지평이 30인 RST 제어기와 PWM 생성이 포함됩니다. 센서는 5ms의 지연으로 회전자 속도를 측정합니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.

DC 모터 제어(스미스 예측기)
이 예제에서는 DC 모터에 대한 스미스 예측기 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 스미스 예측기 제어기와 PWM 생성이 포함됩니다. 센서는 5ms의 지연으로 회전자 속도를 측정합니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.

DC 모터 제어(상태-피드백 및 관측기)
이 예제에서는 DC 모터에 대한 상태-피드백 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 상태-피드백 제어 루프와 PWM 생성이 포함됩니다. 상태 벡터에는 측정된 회전자 속도, 그리고 관측기를 사용하여 추정된 dc 모터 전류가 포함됩니다. 관측기와 상태-피드백 제어기는 시스템의 상태공간 모델을 사용하여 극점 배치를 통해 합성됩니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.

Hybrid Linear Actuator
A hybrid actuator consisting of a DC motor plus lead screw in series with a piezoelectric stack. The DC motor and lead screw combination supports large displacements (tens of millimeters), but is dynamically slow when tracking the reference demand x_ref. Conversely the piezoelectric stack only supports a maximum displacement of +-0.1mm, but has a very fast dynamic response. Combining the two actuator technologies creates a large stroke actuator with highly precise positioning.

Motor-CAD에서 효율 맵 데이터 가져오기
이 예제에서는 Simscape™ Electrical™ Motor & Drive(System Level) 블록을 파라미터화하기 위해 Motor-CAD에서 효율 맵 데이터를 가져오는 방법을 보여줍니다. 이를 통해 모터 드라이브의 신속한 시스템 수준 시뮬레이션이 가능할 뿐만 아니라 손실에 대해 정확한 예측을 수행할 수 있습니다.

Linear Electric Actuator (Motor Model)
How to develop a model of an uncontrolled linear actuator using datasheet parameter values. The actuator consists of a DC motor driving a 6.25:1 worm gear which in turn drives a 3mm lead screw to produce linear motion. Manufacturer data for the actuator defines the no-load linear speed (26mm/s), rated load (1000N), rated-load linear speed (19mm/s), and maximum current (5A). The maximum static force is 4000N and the rated voltage is 24V DC.

제어 기능이 있는 선형 전기 액추에이터
이 예제에서는 제어된 선형 액추에이터의 세부 구현 모델을 보여줍니다. 이 액추에이터는 DC 모터가 웜 기어를 구동하고, 웜 기어가 리드 스크류를 구동하여 선형 모션을 생성하는 구조입니다. 이 모델에는 홀 효과 센서의 양자화 효과와 아날로그 전자 회로에서의 제어 구현이 포함되어 있습니다. 이 모델에는 다양한 수준의 충실도를 갖는 모델을 포함하는 여러 개의 Variant Subsystem이 있습니다.

Model a Motor Drive with Multiple Intermittent Torque Limits
Model a motor drive with multiple intermittent over-torque limits by using Simscape™ Electrical™.

모터 토크-속도 곡선
이 예제에서는 5가지 서로 다른 모터 유형의 토크-속도 특성을 비교하여 보여줍니다. 모터 유형을 선택하려면 Electric Motor 블록을 마우스 오른쪽 버튼으로 클릭하고 상황별 메뉴에서 블록 파라미터 (Subsystem)를 선택합니다. 새로운 창에서 레이블 모드 활성 선택지 파라미터를 사용하여 원하는 모터를 지정합니다. 모든 모터는 거의 동일한 기계적 정격 파워를 갖도록 크기가 조정되어 있습니다.

PWM 전압원과 H-Bridge 드라이버로 DC 모터 제어하기
이 예제에서는 Controlled PWM Voltage 블록과 H-Bridge 블록을 사용하여 DC 모터를 제어하는 방법을 보여줍니다. DC Motor 블록은 2,500rpm에서 10W의 기계적 파워를 제공하며, DC 공급 전압이 12V일 때 무부하 상태에서 4,000rpm 속도로 회전합니다. 따라서 PWM 기준 전압을 최댓값 5V로 설정하면 모터는 4,000rpm으로 작동합니다. PWM 기준 전압을 2.5V로 설정하면 모터는 약 2,000rpm으로 회전합니다. 이 예제에서는 빠른 시뮬레이션을 위해 Controlled PWM Voltage 블록과 H-Bridge 블록의 시뮬레이션 모드 파라미터를 Averaged로 설정합니다. 평균화된 동작을 검증하려면 Controlled PWM Voltage 블록과 H-Bridge 블록의 Simulation mode 파라미터를 모두 PWM으로 설정합니다.
Stepper Motor Averaged Mode
The Stepper Motor simulating in Stepping and Averaged simulation modes. The purpose of Averaged mode is faster simulation for any loads that do not cause slip. To avoid incorrect interpretation of results, the stepper motor has an approximate detection of slip which can be set to generate a warning or an error.

제어 기능이 있는 스테퍼 모터
이 예제에서는 Stepper Motor 블록과 Stepper Motor Driver 블록을 함께 사용하여, 제어 기능이 있는 영구 자석 스테퍼 모터를 모델링하는 방법을 보여줍니다. 모델에는 2가지 제어기 옵션, 즉 위치 제어 옵션과 속도 제어 옵션이 있습니다. 제어기 유형을 변경하려면 Controller 서브시스템을 마우스 오른쪽 버튼으로 클릭하고 Variant -> 레이블 모드 활성 선택지를 선택한 다음 위치 또는 속도를 선택합니다. 스테퍼의 풀 스텝 크기는 1.8도입니다. 위치 제어 모드에서 Ref 포트에 대한 입력은 원하는 스텝 수입니다. 속도 제어 모드에서 Ref 포트에 대한 입력은 원하는 초당 스텝 수입니다.
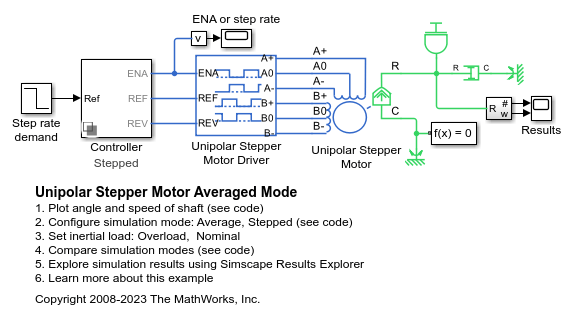
Unipolar Stepper Motor Averaged Mode
The Unipolar Stepper Motor simulating in Stepping and Averaged simulation modes. The purpose of Averaged mode is faster simulation for any loads that do not cause slip. To avoid incorrect interpretation of results, the stepper motor has an approximate detection of slip which can be set to generate a warning or an error.
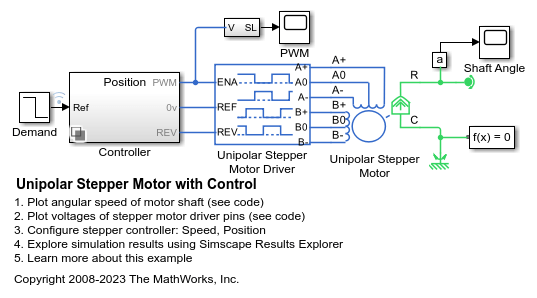
제어 기능이 있는 단극 스테퍼 모터
이 예제에서는 Unipolar Stepper Motor 블록과 Unipolar Stepper Motor Driver 블록을 함께 사용하여, 제어 기능이 있는 영구 자석 스테퍼 모터를 모델링하는 방법을 보여줍니다. 모델에는 2가지 제어기 옵션, 즉 위치 제어 옵션과 속도 제어 옵션이 있습니다. 제어기 유형을 변경하려면 Controller 서브시스템을 마우스 오른쪽 버튼으로 클릭하고 Variant -> 레이블 모드 활성 선택지를 선택한 다음 위치 또는 속도를 선택합니다. 스테퍼의 풀 스텝 크기는 1.8도입니다. 위치 제어 모드에서 Ref 포트에 대한 입력은 원하는 스텝 수입니다. 속도 제어 모드에서 Ref 포트에 대한 입력은 원하는 초당 스텝 수입니다.