적응형 제어 설계
모델링되지 않은 시스템 동특성이나 외란과 같이 시간의 흐름에 따라 변하는 불확실성이 제어 시스템에 포함된 경우 적응형 제어기는 파라미터를 실시간으로 조정하여 변화하는 프로세스 정보를 보정할 수 있습니다. 이를 통해 제어기는 플랜트 동적 요소의 불확실성에도 불구하고 원하는 기준 추종을 달성할 수 있습니다.
Simulink® Control Design™은 다음과 같은 실시간 적응형 제어 방법을 위한 블록을 제공합니다.
극값 탐색 제어 — 제어 시스템에서 도출된 목적 함수를 최대화하기 위한 모델 프리(model-free) 적응형 제어
모델 참조 적응형 제어 — 알려진 기준 모델의 출력을 추종하는 적응형 제어
반복 학습 제어 — 반복 제어 작업의 성능 개선을 위한 모델 기반 및 모델 프리(model-free) 적응형 제어.
슬라이딩 모드 제어 — 불확실성과 외란이 존재하는 상황에서 높은 정밀도와 강인한 제어를 제공하기 위해 시스템 상태를 슬라이딩 면 위에 유지시키는 제어.
가상 기준 피드백 조정 - 입력-출력 데이터를 기반으로 선형으로 파라미터화된 제어기를 자동 조정
적응형 노치 필터 — 감지된 공명에 따라 노치 필터의 주파수, 깊이 및 폭을 자동으로 조정합니다.
블록
| Extremum Seeking Control | Compute controller parameters in real time by maximizing objective function |
| Model Reference Adaptive Control | Compute control actions to make controlled system track reference model (R2021b 이후) |
| Iterative Learning Control | Design iterative learning controller for repetitive control tasks (R2024b 이후) |
| Sliding Mode Controller (Reaching Law) | Design sliding mode controller based on reaching law (R2024b 이후) |
| Linear Sliding Mode Controller (State Feedback) | Design sliding mode control with knowledge of linear systems using state feedback (R2025a 이후) |
| Virtual Reference Feedback Tuning | Automatically tune linearly parameterized controllers based on input-output data (R2025a 이후) |
| Adaptive Notch Filter | Automatically adjust notch filter parameters based on detected resonance (R2026a 이후) |
함수
vrfttune | Tune controller parameters using virtual reference feedback tuning (VRFT) (R2026a 이후) |
vrfttuneOptions | Create options for virtual reference feedback tuning (R2026a 이후) |
도움말 항목
극값 탐색 제어
- 극값 탐색 제어
알 수 없는 시스템 동특성이 존재할 때 목적 함수를 최대화하기 위해 제어기 파라미터를 업데이트합니다. - Extremum Seeking Control for Reference Model Tracking of Uncertain Systems
Track a reference plant model by adapting feedforward and feedback gains for an uncertain dynamic system. - Anti-Lock Braking Using Extremum Seeking Control
Design an extremum seeking controller that maximizes the friction coefficient of an ABS system to achieve the shortest stopping distance.
모델 참조 적응형 제어
- 모델 참조 적응형 제어
불확실성이 존재하는 제어되는 시스템이 주어진 기준 플랜트 모델의 동작을 추종하도록 제어 동작을 계산합니다. - Model Reference Adaptive Control of Satellite Spin
Design an MRAC controller that adapts plant uncertainty model parameters to achieve performance that matches an ideal reference model. - Indirect Model Reference Adaptive Control of First-Order System
Design an indirect MRAC controller that estimates the properties of an unknown first-order system. - Indirect MRAC Control of Mass-Spring-Damper System
Design an indirect MRAC controller that estimates the parameters of an unknown MIMO system.
슬라이딩 모드 제어
- Sliding Mode Control
Design sliding mode control based on reaching law. (R2024b 이후) - Sliding Mode Control Design for Mass-Spring-Damper System
A sliding mode controller defines a sliding surface that the system state converges to and remains on. (R2024b 이후) - Sliding Mode Control Design for a Robotic Manipulator
Create a sliding mode controller for a robotic manipulator with two actuated joints. (R2024b 이후) - Stabilize Chua System Using Sliding Mode Controller
Design sliding mode controller to stabilize a chaotic system. (R2025a 이후) - Sliding Mode Control of DC Motor
Design SMC for reference tracking for a DC motor. (R2025a 이후)
반복 학습 제어
- Iterative Learning Control
Design iterative learning control for a repetitive control task. (R2024b 이후) - Iterative Learning Control of a Single-Input Single-Output System
Implement an ILC controller to improve closed-loop trajectory tracking performance. (R2024b 이후) - Model Based Iterative Learning Control of Multi-Input Multi-Output System
Implement model-based ILC controller to improve closed-loop trajectory tracking performance of a MIMO system. (R2024b 이후)
가상 기준 피드백 조정
- Virtual Reference Feedback Tuning
Automatically tune linear controllers such as FIR, PID, or a combination of linearly parameterized controllers based on input-output data. - Tune PID Controller for Mass-Spring-Damper System Using Virtual Reference Feedback Tuning Block
Tune PID controller for mass-spring-damper using VRFT. (R2025a 이후) - Tune FIR Filter Type Controller for Flexible Transmission System Using Virtual Reference Feedback Tuning Block
Tune FIR filter type controller using VRFT. (R2025a 이후) - Tune PID Controller for Mass-Spring-Damper System Using VRFT at Command Line
Tune PID controller at command line using thevrfttunefunction. (R2026a 이후)
적응형 노치 필터
- Suppress PMSM Harmonics Using Adaptive Notch Filter
Reduce harmonic distortion in a PMSM using an extremum seeking control based adaptive notch filter. (R2025a 이후) - Suppress Resonances Using Adaptive Notch Filter
Suppress resonances in a coupled inertia system using an adaptive notch filter implement using extremum seeking control and frequency response estimator. (R2025a 이후)
추천 예제
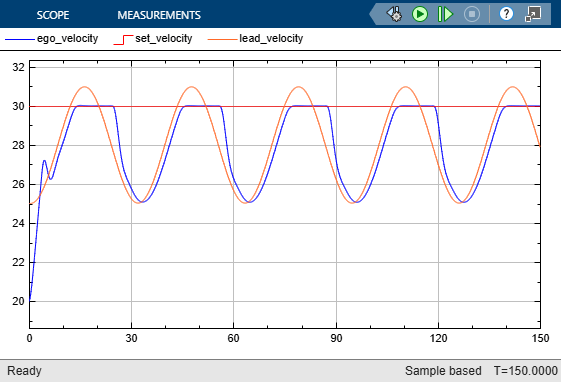
Adaptive Cruise Control Using Extremum Seeking Control
Design an extremum seeking controller to adjust controller gains for an adaptive cruise control system.
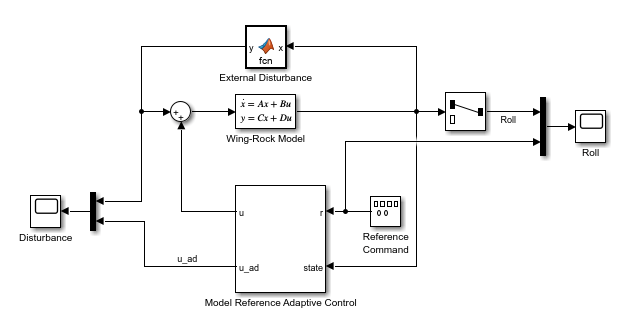
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Design an MRAC controller that adapts disturbance model parameters to achieve performance matching an ideal reference model.

Quadrotor Control Using Model Reference Adaptive Control
Control a quadrotor vehicle performing way-point guidance using model reference adaptive control.
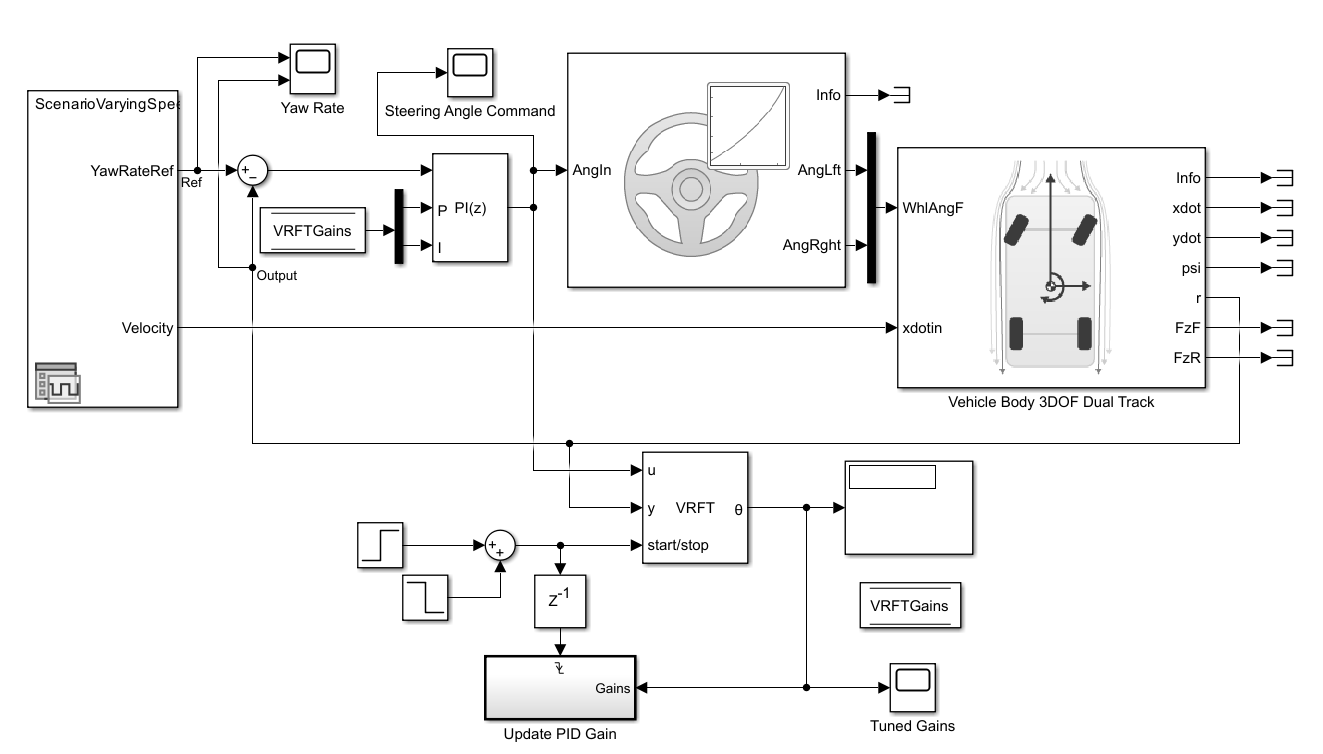
Tune PID Controller for Vehicle Lateral Control System Using Virtual Reference Feedback Tuning Block
Use the Virtual Reference Feedback Tuning block to tune PID controller for a vehicle lateral control system.
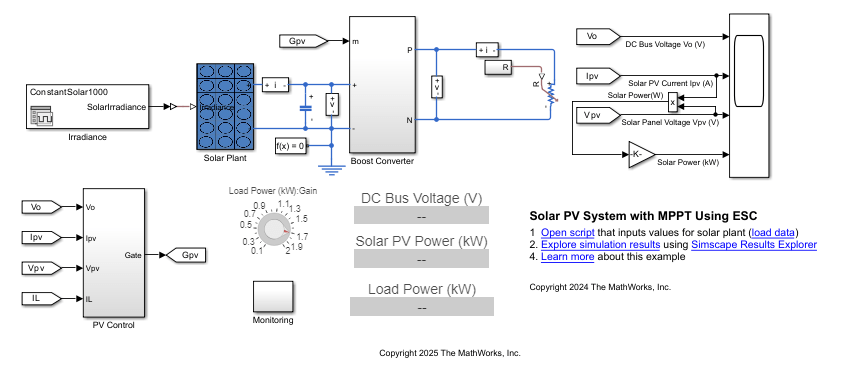
Solar PV System with Maximum Power Point Tracking Using Extremum Seeking Control
Implement the MPPT algorithm in a solar photovoltaic system using extremum seeking control.

Battery State of Charge Estimation using Extremum Seeking Control
Use ESC as a virtual sensor for battery cell state of charge estimation.
Quadrotor Trajectory Tracking Using Iterative Learning Control
Minimize trajectory tracking error for quadrotor under wind disturbances using iterative learning control.
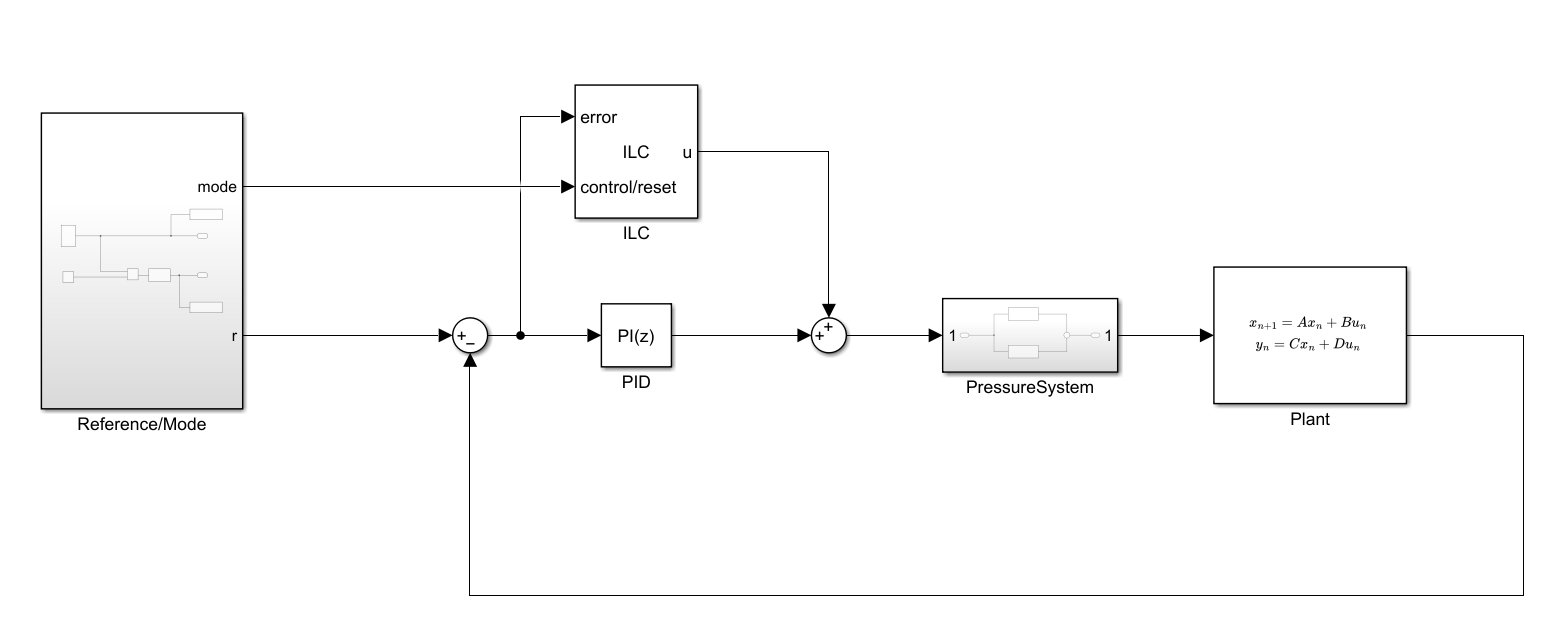
Soft Robot Control Using Iterative Learning Control
Demonstrates control of soft robot using the Iterative Learning Control (ILC) block in Simulink®. The soft-robot arm is commanded to track a step signal, while the actuators are pressure actuated using soft bellows. This example demonstrates, using ILC over repeated iterations, the controller learns to minimize error and get close tracking of given reference signal.