이득 스케줄링
이득 스케줄링이 적용된 제어기는 이득이 시간, 동작 조건 또는 플랜트 파라미터의 함수로 자동으로 조정된 제어기입니다. 이득 스케줄링은 시간 또는 동작 조건에 따라 동특성이 변하는 시스템을 제어하기 위한 일반적인 전략입니다. 이러한 시스템에는 선형 파라미터 가변(LPV) 시스템과 많은 비선형 시스템 유형이 포함됩니다. Simulink®에서 이득 스케줄링이 적용된 제어기를 조정하기 위해 tunableSurface 명령을 사용하여 가변 이득을 스케줄링 변수의 함수로 나타냅니다. 이득 스케줄링이 적용된 제어기의 워크플로 개요는 Gain Scheduling Basics 항목을 참조하십시오.
함수
블록
도움말 항목
이득 스케줄링이 적용된 제어 시스템
- Gain Scheduling Basics
Gain scheduling is an approach to control of non-linear systems using a family of linear controllers, each providing satisfactory control for a different operating point of the system. - Model Gain-Scheduled Control Systems in Simulink
In Simulink, model gain schedules using lookup tables, interpolation blocks, or MATLAB Function blocks.
이득 스케줄 조정
- Tune Gain Schedules in Simulink
Understand the general tuning workflow for usingsystuneto tune gain-scheduled controllers. - Plant Models for Gain-Scheduled Controller Tuning
To tune a gain-scheduled control system, you need a collection of linear models describing the plant dynamics at the selected design points. - Multiple Design Points in slTuner Interface
For tuning a gain-scheduled control system, associate a family of linear plant models with theslTunerinterface to your Simulink model. - Parameterize Gain Schedules
A gain surface parameterizes a variable gain in terms of the scheduling variables. Use gain surfaces to model variable gains in a gain-scheduled control system. - Change Requirements with Operating Condition
When tuning gain-scheduled controllers, you can specify tuning objectives that depend on the scheduling variables. - Validate Gain-Scheduled Control Systems
Tuning gain-scheduled controllers guarantees suitable performance only near each design point. It is important to validate the tuning results over the full range of operating conditions.
이득 스케줄링 자동 조정
- Gain-Scheduled PID Autotuning a VTOL UAV During Forward and Backward Transition
Tune gain-scheduled PID controller for VTOL UAV transitioning between operating modes. (R2024a 이후) - Gain-Scheduled PID Autotuning Torque Control for a Nonlinear PMSM
Tune gain-scheduled PID controllers for d-axis and q-axis current loops of a nonlinear PMSM model. (R2024a 이후)
HL-20 자동 조종 사례 연구
- Trimming and Linearization of the HL-20 Airframe
Linearize an airframe model at an array of design points to use for gain-scheduled control design. - Angular Rate Control in the HL-20 Autopilot
Tune gain-scheduled PI controllers for the inner loop of the HL-20 airframe model. - Attitude Control in the HL-20 Autopilot - SISO Design
Tune a gain-scheduled SISO architecture for controlling roll, pitch, and yaw of the airframe. - Attitude Control in the HL-20 Autopilot - MIMO Design
Tune a gain-scheduled MIMO architecture for controlling roll, pitch, and yaw of the airframe. - MATLAB Workflow for Tuning the HL-20 Autopilot
Design a gain-scheduled control system for the HL-20 airframe in MATLAB®.
추천 예제

Gain-Scheduled Control of a Chemical Reactor
Tune a gain-scheduled controller for a chemical reactor transitioning from low to high conversion rate.
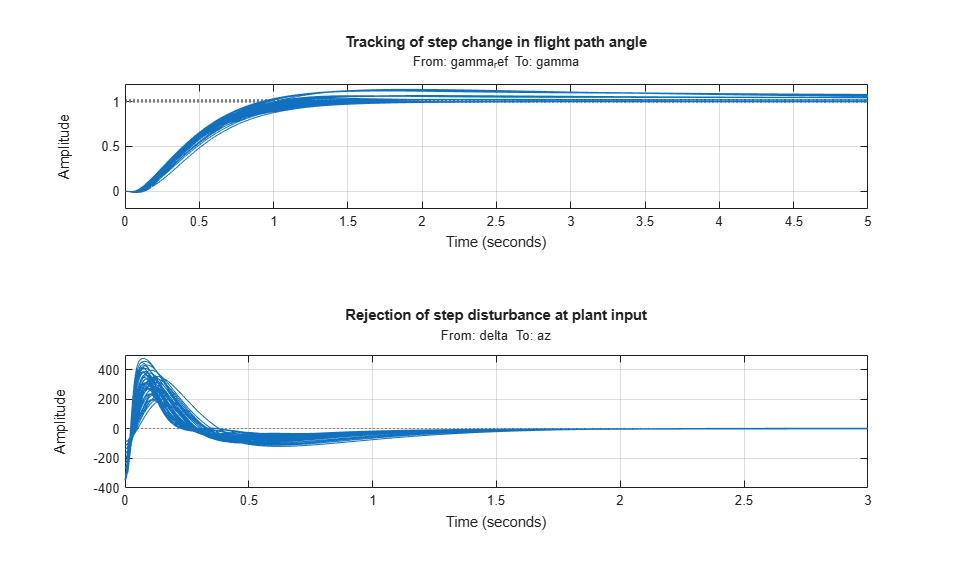
Tuning of Gain-Scheduled Three-Loop Autopilot
Uses systune to generate smooth gain-schedules for a
two-dimensional grid of operating conditions for a control system modeled in Simulink.

Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.

Tune Gain-Scheduled Controller for PMSM Model Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PI controller for a PMSM model in one simulation.
UAV Inflight Failure Recovery with Reference Trajectory Tracking
Design a controller to recover a UAV experiencing rotor fault.