모델 참조 적응형 제어
Model Reference Adaptive Control 블록은 불확실성이 존재하는 제어되는 시스템이 주어진 기준 플랜트 모델의 동작을 추종하게끔 하는 제어 동작을 계산합니다. 이 블록을 사용하여 다음과 같은 모델 참조 적응형 제어(MRAC: Model Reference Adaptive Control) 알고리즘을 구현할 수 있습니다.
직접 MRAC — 기준 플랜트 모델 상태와 제어되는 시스템 상태 사이의 실시간 추종 오차를 기반으로 피드백 및 피드포워드 제어기 이득을 추정합니다.
간접 MRAC — 기준 플랜트 모델 상태와 추정된 시스템 상태 사이의 추종 오차에 기반하여 제어되는 시스템의 파라미터를 추정합니다. 그런 다음 추정된 시스템과 기준 모델의 파라미터를 기반으로 피드백 제어기 이득과 피드포워드 제어기 이득을 도출합니다.
직접 MRAC와 간접 MRAC 모두 제어 중인 시스템에서 외부 외란 및 불확실성의 모델도 추정합니다. 그런 다음 제어기는 제어 동작을 계산할 때 이 모델을 사용하여 외란 및 불확실성을 보정합니다.
두 경우 모두 제어기는 추종 오차를 기반으로 추정된 파라미터와 외란 모델을 실시간으로 업데이트합니다.
기준 모델
직접 MRAC와 간접 MRAC 모두에서 다음 기준 플랜트 모델은 실제로 달성하고자하는 동작의 특성을 나타내는 이상적인 시스템입니다.
여기서 각각은 다음을 나타냅니다.
r(t)는 외부 기준 신호입니다.
xm(t)는 기준 플랜트 모델의 상태입니다. r(t)를 알고 있으므로 기준 모델을 시뮬레이션하여 xm(t)를 얻을 수 있습니다.
Am은 상수인 상태 행렬입니다. 안정적인 기준 모델의 경우 Am은 모든 고유값이 엄격하게 음의 실수부를 가져야 하는 Hurwitz 행렬이어야 합니다.
Bm은 제어 유효 행렬입니다.
외란 및 불확실성 모델
Model Reference Adaptive Control 블록은 제어되는 시스템의 외란 및 모델 불확실성에 대한 내부 모델인 uad를 가지고 있습니다.
여기서 ϕ(x)는 모델 특징으로 구성된 벡터입니다. w는 추종 오차를 기반으로 제어기가 실시간으로 업데이트하는 적응형 제어 가중 벡터입니다.
ϕ(x)를 정의하기 위해 다음 특징 정의 중 하나를 사용할 수 있습니다.
제어되는 플랜트의 상태 벡터 — 이 접근 방식에서는 시스템의 불확실성이 과소 표현될 수 있습니다. 외란 및 모델 불확실성의 복잡성을 모를 경우 상태를 특징으로 사용하는 것이 유용한 출발점이 될 수 있습니다.
가우스 방사형 기저 함수 — 외란 및 모델 불확실성이 비선형이고 외란 모델의 구조를 알 수 없는 경우 이 옵션을 사용합니다. 방사형 기저 함수를 사용하려면 모델의 작동 영역에 대한 사전 지식이 어느 정도 있어야 하지만, 경우에 따라 어려울 수 있습니다.
단일 은닉 계층 신경망 — 외란 및 모델 불확실성이 비선형이고 외란 모델의 구조를 알 수 없으며 작동 영역에 대한 사전 지식이 없는 경우 이 옵션을 사용합니다. 신경망은 어떤 연속 함수든 근사할 수 있는 보편적 함수 근사기입니다.
제어기 블록에 제공된 외부 소스 — 사용자 지정 특징 벡터를 정의하려면 이 옵션을 사용합니다. 외란 및 불확실성 모델의 구조를 알고 있는 경우 이 옵션을 사용할 수 있습니다. 예를 들어 알 수 없는 특정 플랜트 파라미터를 식별하기 위해 사용자 지정 특징 벡터를 사용할 수 있습니다.
직접 MRAC
직접 MRAC 제어기는 다음과 같은 제어 구조를 가집니다.
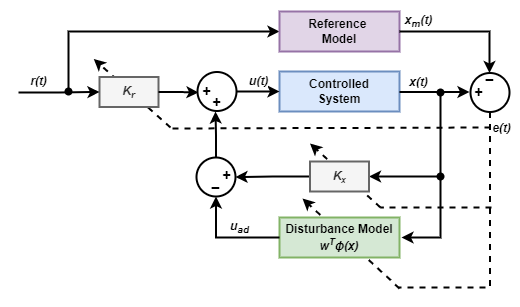
이 제어기는 다음과 같이 제어 입력 u(t)를 계산합니다.
여기서 각각은 다음을 나타냅니다.
x(t)는 제어되는 시스템의 상태입니다.
r(t)는 외부 기준 신호입니다.
kx와 kr은 피드백 제어기 이득과 피드포워드 제어기 이득입니다.
uad는 외란 모델에서 도출된 적응형 제어 컴포넌트입니다.
ϕ(x)는 외란 모델 특징을 포함합니다.
w는 적응형 외란 모델 가중 벡터입니다.
V는 은닉 계층 가중 벡터입니다.
단일 은닉 계층 신경망의 경우 uad는 다음과 같습니다.
여기서 각각은 다음을 나타냅니다.
V는 은닉 계층 가중 벡터입니다.
σ는 시그모이드 활성화 함수입니다.
제어기는 제어되는 시스템의 상태와 기준 모델 상태 사이의 오차 e(t)를 계산합니다. 그런 다음 이 오차를 사용하여 kx, kr, w 값을 실시간으로 조정합니다.
공칭 모델
일반적으로 모델링 불확실성 및 외부 외란이 나타나는 제어되는 시스템은 다음과 같은 공칭 상태 방정식을 갖습니다. 제어기는 제어기 파라미터를 업데이트할 때 이 예상되는 공칭 플랜트 동작을 사용합니다.
여기서 각각은 다음을 나타냅니다.
x(t)는 제어하려는 시스템의 상태입니다.
u(t)는 제어 입력입니다.
A는 상수인 상태 천이 행렬입니다.
B는 상수인 제어 유효 행렬입니다.
f(x)는 시스템 내의 일치하는 불확실성입니다.
파라미터 업데이트
직접 MRAC 제어기는 상태 벡터, 방사형 기저 함수 및 외부 소스 특징 정의에 대한 제어기 이득과 외란 모델 가중치를 업데이트하기 위해 다음 방정식을 사용합니다[1][2].
단일 은닉 계층의 외란 모델 업데이트 방정식에는 다음 업데이트 방정식과 함께 동일한 제어기 이득 업데이트가 사용됩니다.
여기서 P는 기준 모델 상태 행렬에 기반한 다음 랴푸노프 함수의 해이고 B는 공칭 플랜트 모델의 제어 유효 행렬입니다.
여기서 Q는 N×N 크기의 양의 정부호 행렬입니다. N은 상태 벡터 x(t)의 크기입니다.
간접 MRAC
간접 MRAC 제어기는 다음과 같은 제어 구조를 가집니다. 기준 모델은 다음과 같습니다.
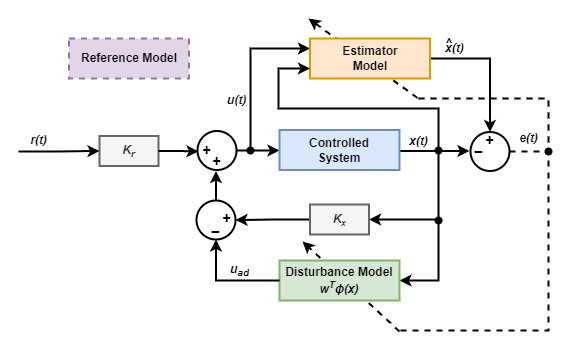
이 제어기는 다음과 같이 제어 입력 u(t)를 계산합니다.
여기서 각각은 다음을 나타냅니다.
(t)는 추정기 모델에서 생성된 제어되는 시스템의 추정된 상태입니다.
r(t)는 외부 기준 신호입니다.
kx와 kr은 피드백 제어기 이득과 피드포워드 제어기 이득입니다.
uad는 외란 모델에서 도출된 적응형 제어 컴포넌트입니다.
ϕ(x)는 외란 모델 특징을 포함합니다.
w는 적응형 외란 모델 가중 벡터입니다.
제어기는 실제 시스템 상태와 추정된 시스템 상태 사이의 오차 e(t)를 계산합니다. 그런 다음 이 오차를 사용하여 w 값을 실시간으로 조정합니다. 제어기는 e(t)를 사용하여 추정기 모델의 파라미터를 실시간으로 업데이트합니다. 이득 kx와 kr의 값은 추정기 모델 파라미터와 기준 모델의 파라미터에서 도출됩니다.
추정기 모델과 제어기 이득
간접 MRAC 제어기에는 다음과 같은 제어되는 시스템의 추정기 모델이 포함됩니다.
여기서 각각은 다음을 나타냅니다.
(t)는 추정된 시스템 상태입니다.
u(t)는 제어 입력입니다.
는 추정기의 상태 천이 행렬입니다.
는 추정기의 제어 유효 행렬입니다.
제어기는 작동 중에 추정 오차 e(t)를 기반으로 와 를 업데이트합니다.
간접 MRAC 제어기는 제어기 이득을 직접 추정하는 대신 다음과 같은 동적 역행렬 기반 접근 방식을 사용하여 기준 모델 및 추정기 모델의 파라미터로부터 피드백 이득 kx 및 피드포워드 이득 kr을 도출합니다.
여기서 은 행렬 의 무어-펜로즈 의사 역행렬입니다.
파라미터 업데이트
간접 MRAC 제어기는 상태 벡터, 방사형 기저 함수 및 외부 소스 특징 정의에 대한 추정기 모델 파라미터와 외란 모델 가중치를 업데이트하는 데 다음 방정식을 사용합니다[1][2].
단일 은닉 계층의 외란 모델 업데이트 방정식에는 다음 업데이트 방정식과 함께 동일한 추정기 모델 파라미터 업데이트가 사용됩니다.
여기서 P는 다음 랴푸노프 함수의 해입니다.
kτ는 추정기 피드백 이득입니다. 기본적으로 이 값은 기준 모델 상태 천이 행렬 Am에 대응합니다. 그러나 다른 추정기 피드백 이득 값을 지정할 수도 있습니다.
학습 수정
직접 MRAC와 간접 MRAC 모두에서 더 높은 학습률로 강인성을 추가하기 위해 선택적 모멘텀 항을 포함하도록 파라미터 업데이트를 수정할 수 있습니다. 두 가지 가능한 학습 수정 방법인 시그마 수정 및 e-수정 중 하나를 선택할 수 있습니다.
시그마 수정의 경우 각 파라미터 업데이트의 모멘텀 항은 모멘텀 가중치 파라미터 σ와 현재 파라미터 값의 곱입니다. 예를 들어 직접 MRAC 제어기에 대한 다음 업데이트 방정식에는 시그마 수정 항이 포함됩니다.
e-수정의 경우 제어기는 시그마 수정 모멘텀 항을 오차 벡터의 노름으로 스케일링합니다. 예를 들어 간접 MRAC 제어기에 대한 다음 업데이트 방정식에는 e-수정 항이 포함됩니다.
두 방법 중 하나에 대한 학습 수정의 양을 조정하려면 모멘텀 가중치 파라미터 σ의 값을 변경하십시오.
모델 참조 적응형 제어에 대한 세부 정보
모델 참조 적응형 제어에 대한 자세한 내용을 보려면 비디오를 시청하십시오. 이 비디오는 학습 기반 제어 비디오 시리즈 중 하나입니다.
참고 문헌
[1] Ioannou, Petros A., and Jing Sun. Robust Adaptive Control, Courier Corporation, 2012.
[2] Narendra, Kumpati S, and Anuradha M Annaswamy. Stable Adaptive Systems. Courier Corporation, 2012.
[3] Narendra, Kumpati S., and Anuradha M. Annaswamy. “Robust Adaptive Control.” In 1984 American Control Conference, 333–35. San Diego, CA, USA: IEEE, 1984. https://doi.org/10.23919/ACC.1984.4788398.