극값 탐색 제어
극값 탐색 제어(ESC: Extremum Seeking Control)는 모델 프리(model-free), 실시간 적응형 제어 알고리즘으로, 시스템 동특성과 제어 파라미터에서 목적 함수로의 매핑을 알지 못하는 상황에서 파라미터를 조정하는 데 유용합니다. 극값 탐색을 사용하여 정적 최적화 문제를 풀고 동적 시스템의 파라미터를 최적화할 수 있습니다.
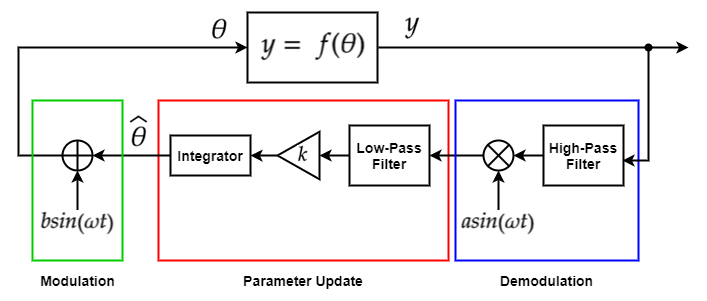
극값 탐색 알고리즘은 다음 단계를 사용하여 파라미터 값을 조정합니다.
변조 — 낮은 진폭의 정현파 신호를 사용하여 최적화하려는 파라미터의 값을 섭동합니다.
시스템 응답 — 최적화 중인 시스템이 파라미터 섭동에 반응합니다. 이 반응으로 목적 함수 값에서 상응하는 변화가 발생합니다.
복조 — 목적 함수 신호에 변조 신호와 주파수가 동일한 정현파를 곱합니다. 이 단계에는 목적 함수 신호에서 편향을 제거하기 위한 고역통과 필터가 선택적으로 포함될 수 있습니다.
파라미터 업데이트 — 복조된 신호를 적분하여 파라미터 값을 업데이트합니다. 파라미터 값은 적분기의 상태에 해당합니다. 이 단계에는 복조된 신호에서 고주파수 잡음을 제거하기 위한 저역통과 필터가 선택적으로 포함될 수 있습니다.
Simulink® Control Design™ 소프트웨어는 Extremum Seeking Control 블록을 사용하여 이 알고리즘을 구현합니다. 극값 탐색 제어의 예는 다음을 참조하십시오.
시간 영역
Extremum Seeking Control 블록을 사용하여 연속시간 제어기와 이산시간 제어기를 둘 다 구현할 수 있습니다. ESC 알고리즘은 두 경우 모두 동일합니다. 제어기의 시간 영역을 변경하면 조정 루프에 사용되는 고역통과 필터, 저역통과 필터, 적분기의 시간 영역이 영향을 받습니다.
Extremum Seeking Control 블록에 상응하는 하드웨어 배포가 가능한 코드를 생성하려면 이산시간 제어기를 사용하십시오.
다음 표는 Extremum Seeking Control 블록의 필터 및 적분기에 대한 연속시간 전달 함수와 이산시간 전달 함수를 보여줍니다.
| 제어기 요소 | 연속시간 전달 함수 | 이산시간 전달 함수 |
|---|---|---|
| 고역통과 필터 | | |
| 저역통과 필터 | | |
| 적분기 | | 순방향 오일러: 역방향 오일러: 사다리꼴: |
여기서 각각은 다음을 나타냅니다.
ωl은 저역통과 필터 차단 주파수입니다.
ωh는 고역통과 필터 차단 주파수입니다.
Ts는 이산시간 제어기 학습률의 샘플 시간입니다.
정적 최적화
극값 탐색을 보여주기 위해 다음과 같은 정적 최적화 문제가 있다고 가정하겠습니다.
여기서 각각은 다음을 나타냅니다.
는 추정된 파라미터 값입니다.
θ는 변조 신호입니다.
y = f(θ)는 최대화할 함수 출력, 즉 목적 함수입니다.
ω는 변조 신호와 복조 신호의 강제 주파수입니다.
b·sin(ωt)는 변조 신호입니다.
a·sin(ωt)는 복조 신호입니다.
k는 학습률입니다.
최적 파라미터 값 θ*는 f(θ)의 최댓값에서 발생합니다.
여러 파라미터를 최적화하려면 파라미터마다 별도의 조정 루프를 사용해야 합니다.
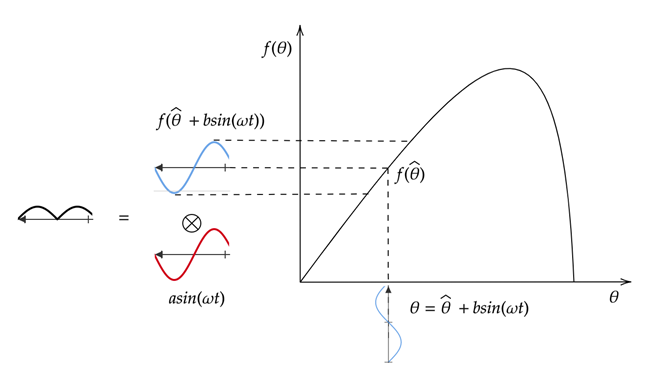
다음 그림은 목적 함수 곡선의 증가하는 부분에 대한 극값 탐색을 보여줍니다. 변조된 신호 θ는 현재 추정된 파라미터와 변조 신호의 합입니다. f(θ)를 적용하면 변조 신호와 위상이 같은 섭동된 목적 함수가 생성됩니다. 섭동된 목적 함수에 복조 신호를 곱하면 양의 신호가 생성됩니다. 이 신호를 적분하면 θ 값이 증가하여 목적 함수의 피크에 더 가까이 다가갑니다.
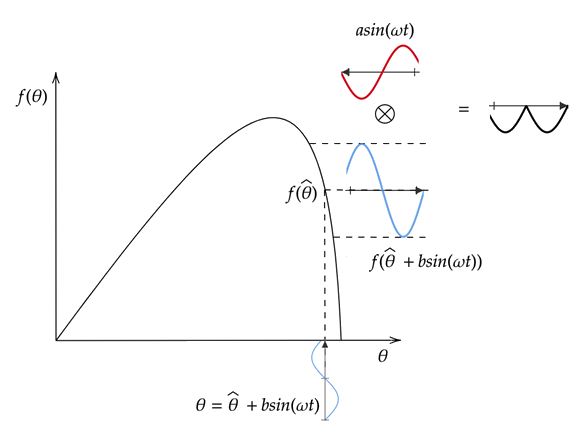
다음 그림은 목적 함수 곡선의 감소하는 부분에 대한 극값 탐색을 보여줍니다. 이 경우 f(θ)를 적용하면 변조 신호와 위상이 180도 다른 섭동된 목적 함수가 생성됩니다. 복조 신호를 곱하면 음의 신호가 생성됩니다. 이 신호를 적분하면 θ 값이 감소하여 목적 함수의 피크에 더 가까이 다가갑니다.
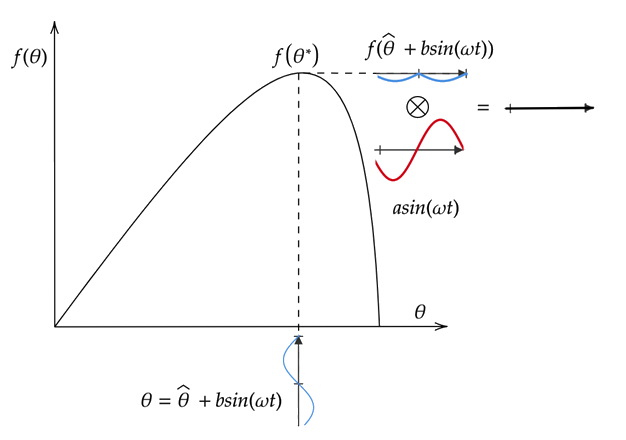
다음 그림은 목적 함수 곡선의 평탄한 부분, 즉 최댓값에 가까운 곡선 부분에 대한 극값 탐색을 보여줍니다. 이 경우 f(θ)를 적용하면 거의 0에 가까운 섭동된 목적 함수가 생성됩니다. 복조 신호를 곱한 다음 그 신호를 적분해도 이미 최적값 θ*에 근접한 θ 값은 크게 변하지 않습니다.
동적 시스템 최적화
동적 시스템의 극값 탐색 최적화는 정적 최적화와 유사한 방식으로 이루어집니다. 그러나 이 경우 파라미터 θ는 시간 종속 동적 시스템의 출력에 영향을 미칩니다. 최대화할 목적 함수는 시스템 출력으로부터 계산됩니다. 다음 그림은 동적 시스템의 일반적인 조정 루프를 보여줍니다.
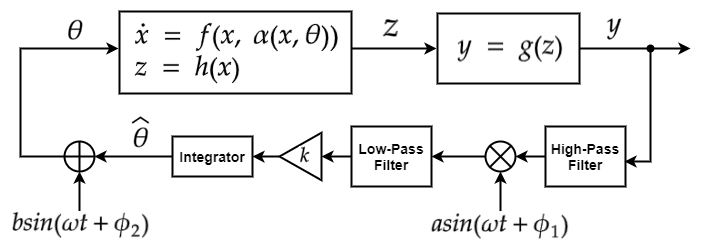
여기서 각각은 다음을 나타냅니다.
는 동적 시스템의 상태 함수입니다.
z = h(x)는 동적 시스템의 출력입니다.
y = g(z)는 동적 시스템의 출력에서 산출된 목적 함수입니다.
ϕ1은 복조 신호의 위상입니다.
ϕ2는 변조 신호의 위상입니다.
ESC 설계 지침
극값 탐색 제어기를 설계할 때 다음 지침을 고려하십시오.
시스템 동특성이 가장 빠른 시간 스케일에 있고 강제 주파수가 중간 속도의 시간 스케일에 있으며 필터 차단 주파수가 가장 느린 시간 스케일에 있는지 확인합니다.
변조 신호 진폭보다 훨씬 큰 복조 신호 진폭을 지정합니다(a ≫ b).
cos(ϕ1 – ϕ2) > 0이 되도록 변조 신호의 위상각과 복조 신호의 위상각을 선택합니다.
여러 파라미터를 조정할 때 각 조정 루프의 강제 주파수는 달라야 합니다.
고역통과 필터와 저역통과 필터를 사용하지 않은 시스템을 설계해 봅니다. 성능이 만족스럽지 않으면 필터를 하나 추가해 보거나 둘 다 추가해 볼 수 있습니다.
극값 탐색 제어에 대한 세부 정보
극값 탐색 제어에 대한 자세한 내용을 보려면 비디오를 시청하십시오. 이 비디오는 학습 기반 제어 비디오 시리즈 중 하나입니다.
참고 문헌
[1] Ariyur, Kartik B., and Miroslav Krstić. Real Time Optimization by Extremum Seeking Control. Hoboken, NJ: Wiley Interscience, 2003.