카메라 보정하기
카메라 보정은 보정 패턴이 포함된 영상을 사용하여 카메라 파라미터를 추정하는 과정입니다. 이러한 파라미터에는 카메라 내부 파라미터, 왜곡 계수, 카메라 외부 파라미터가 있습니다. 이러한 카메라 파라미터를 사용하여 영상에서 렌즈 왜곡 효과를 제거하고, 평면 객체를 측정하고, 여러 대의 카메라로부터 3차원 장면을 복원하고, 여러 다양한 응용 사례에서 컴퓨터 비전을 수행할 수 있습니다.
그림을 클릭하면 해당 항목을 볼 수 있습니다.
어안 카메라 보정은 어안 렌즈에 특화된 파라미터와 왜곡 계수를 추정함으로써 이 과정을 확장하며, 이는 SLAM, 오도메트리, 감시, VR, 영상 이어 붙이기와 같은 다양한 응용 분야에서 과도한 왜곡을 보정하고 영상 점을 실제 세계 좌표에 정확하게 매핑하는 데 필수적입니다. 다중 카메라 보정은 시스템 내의 모든 카메라가 장면 지오메트리에 대해 일관된 이해를 공유하도록 하여, 3차원 모션 캡처, 복원, 사진측량과 같은 작업을 가능하게 합니다. 반면, 로봇 핸드-아이 보정은 로봇 팔과 카메라 간의 공간적 관계를 확인하여 정밀한 비주얼 서보잉(visual servoing)과 상호 작용을 가능하게 합니다. 단일 카메라의 내부 및 외부 파라미터와 왜곡을 구하기 위해 카메라 보정기 앱과 함수를 사용할 수 있으며, 스테레오 파라미터와 상대적인 방향을 구하기 위해 스테레오 카메라 보정기 앱과 함수를 사용할 수 있습니다. 왜곡 제거와 정확한 광각 3차원 복원을 위해서는 어안 보정 전용 함수를 사용할 수 있습니다.
앱
| 카메라 보정기 | 단일 카메라의 기하 파라미터 추정 |
| 스테레오 카메라 보정기 | 스테레오 카메라의 기하 파라미터 추정 |
함수
도움말 항목
- 카메라 보정이란?
영상 또는 비디오 카메라의 렌즈 및 영상 센서에 대한 파라미터를 추정합니다.
- What Is Robot Hand-Eye Calibration?
Understand moving- and stationary- robot camera configurations for hand-eye calibration.
- What Is Multi-Camera Calibration?
Estimate position and orientations of cameras in a multi-camera system.
- 어안 보정 기본 사항
MATLAB에서의 어안 카메라 모델 및 보정.
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
- 보정 패턴
체커보드, 원 그리드 또는 사용자 지정 검출기 패턴을 사용한 카메라 보정.
- 카메라 보정을 위해 카메라를 준비하고 영상 캡처하기
카메라를 설정하고 보정기 앱에서 사용할 카메라 보정 영상을 캡처합니다.
- Prepare Cameras and Capture Images for Multi-Camera Calibration
Set up your camera and capture camera calibration images for multi-camera calibration.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
추천 예제
3-D Motion Reconstruction Using Multiple Cameras
Reconstruct 3-D motion of an object for use in a motion capture system consisting of multiple cameras.
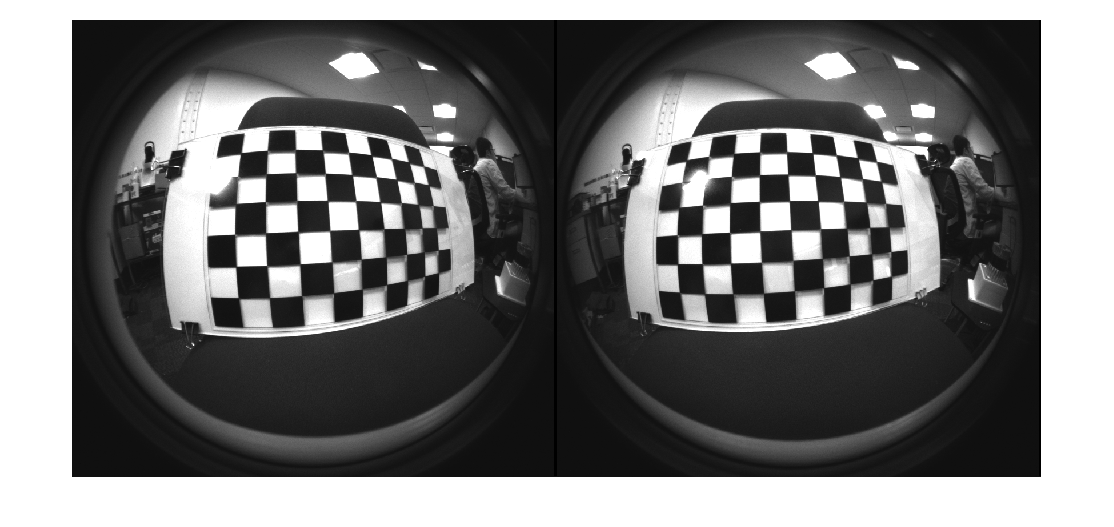
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.

Estimate Pose of Moving Camera Mounted on a Robot
Perform and verify hand-eye calibration for a robot arm equipped with a camera.

Estimate Pose of Fixed Camera Relative to Robot Base
Estimate the camera intrinsics for a fixed camera using hand-to-eye calibration.

Camera Calibration Using Custom Planar Calibration Patterns
Detect and localize AprilTags in a calibration pattern.

단일 카메라 보정의 정확도 평가하기
추정된 카메라 파라미터의 정확도를 평가합니다.
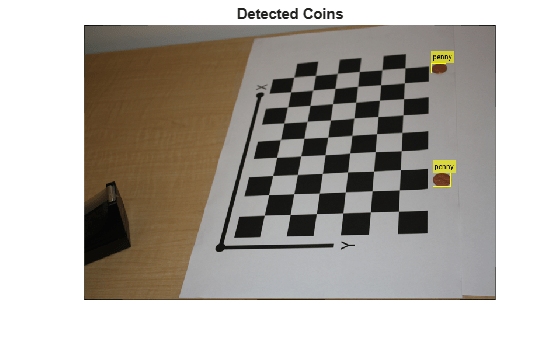
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model.