estimateCameraParameters
단일 또는 스테레오 카메라 보정
구문
설명
[는 단일 카메라와 스테레오 카메라의 내부 파라미터 및 외부 파라미터와 왜곡 계수의 추정값이 포함된 cameraParams,imagesUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)cameraParams 객체를 반환합니다. 이 함수는 카메라 파라미터 추정에 사용한 영상과 단일 카메라 보정에 대한 표준 추정 오차도 반환합니다. estimateCameraParameters 함수는 외부 파라미터와 내부 파라미터를 추정합니다.
[는 스테레오 카메라의 파라미터가 포함된 stereoParams,pairsUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)stereoParameters 객체인 stereoParams를 반환합니다. 이 함수는 스테레오 파라미터 추정에 사용한 영상과 스테레오 카메라 보정에 대한 표준 추정 오차도 반환합니다.
cameraParams = estimateCameraParameters(___,Name=Value)WorldUnits="mm"는 세계 단위를 밀리미터로 설정합니다.
예제
보정 영상 세트를 만듭니다.
imds = imageDatastore(fullfile(toolboxdir("vision"),"visiondata",... "calibration","mono")); imageFileNames = imds.Files;
보정 패턴을 검출합니다.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
사각형 코너의 세계 좌표를 생성합니다.
squareSizeInMM = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSizeInMM);
카메라를 보정합니다.
I = preview(imds); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
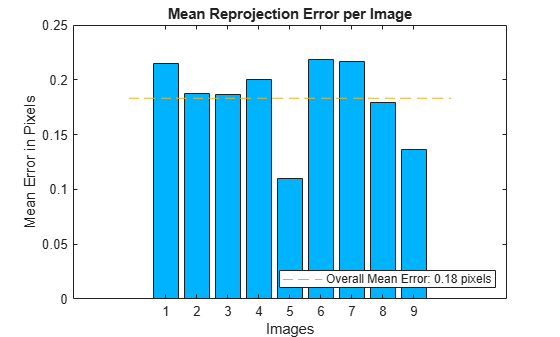
보정 정확도를 시각화합니다.
showReprojectionErrors(params);
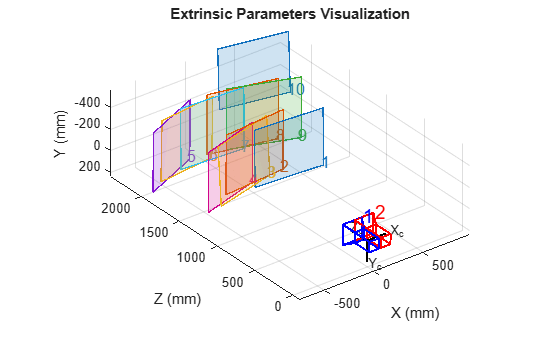
카메라 외부 파라미터를 시각화합니다.
figure; showExtrinsics(params);
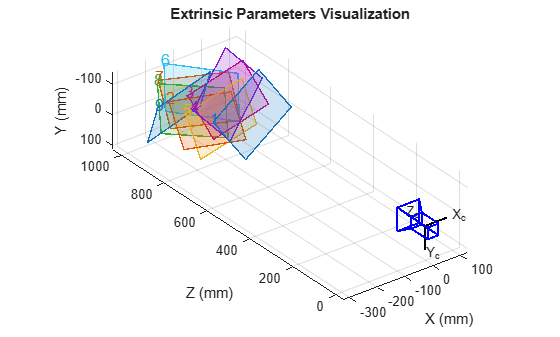
drawnow;
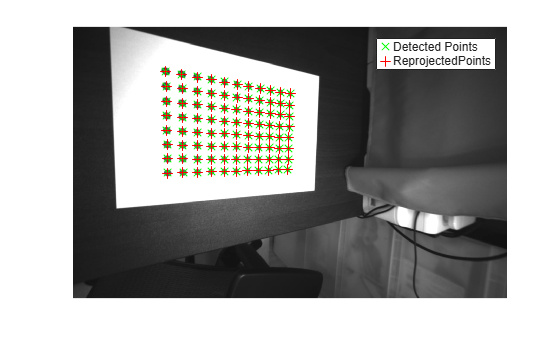
검출되고 재투영된 점을 플로팅합니다.
figure;
imshow(imageFileNames{1});
hold on;
plot(imagePoints(:,1,1), imagePoints(:,2,1),"go");
plot(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),"r+");
legend("Detected Points","ReprojectedPoints");
hold off;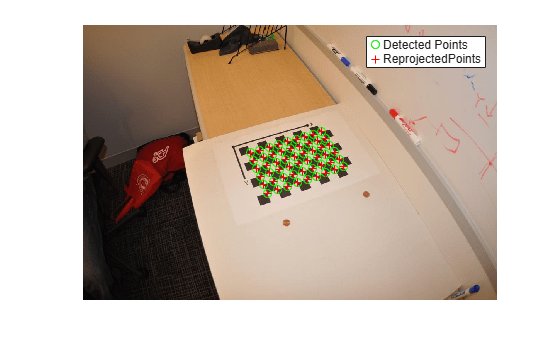
보정 영상을 지정합니다.
leftImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","left")); rightImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","right"));
체커보드를 검출합니다.
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);체커보드 키포인트의 세계 좌표를 지정합니다. 사각형 크기의 단위는 밀리미터입니다.
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
스테레오 카메라 시스템을 보정합니다. 두 카메라의 해상도는 같습니다.
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
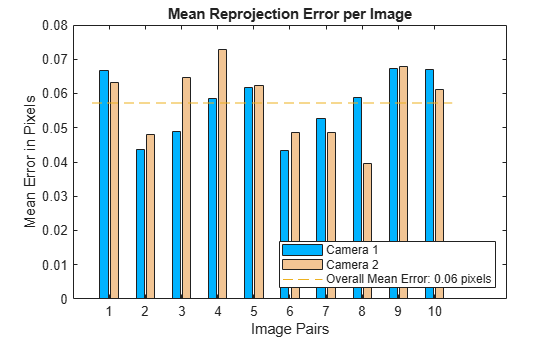
보정 정확도를 시각화합니다.
showReprojectionErrors(params)
카메라 외부 파라미터를 시각화합니다.
figure showExtrinsics(params)
구조체로 변환합니다.
paramsStruct = toStruct(params)
paramsStruct = struct with fields:
CameraParameters1: [1×1 struct]
CameraParameters2: [1×1 struct]
RotationOfCamera2: [3×3 double]
TranslationOfCamera2: [-119.8720 -0.4005 -0.0258]
Version: [1×1 struct]
RectificationParams: [1×1 struct]
보정 영상 세트를 만듭니다.
imds = imageDatastore(fullfile(toolboxdir("vision"),"visiondata",... "calibration","circleGrid","mono")); calibrationImages = readall(imds); calibrationImages = cat(4,calibrationImages{:});
원 그리드 패턴의 크기를 정의합니다.
patternDims = [8 11];
보정 영상에서 패턴을 검출합니다.
imagePoints = detectCircleGridPoints(calibrationImages, patternDims,... PatternType="symmetric");
원 그리드 키포인트의 세계 좌표를 지정합니다. 중심 거리의 단위는 밀리미터입니다.
centerDistance = 18; % millimeters worldPoints = patternWorldPoints("circle-grid-symmetric",patternDims,centerDistance);
보정 영상을 사용하여 카메라를 보정합니다.
imageSize = size(calibrationImages,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
검출된 패턴 그리드와 재투영된 점을 플로팅합니다.
figure imshow(calibrationImages(:,:,:,1)) hold on plot(imagePoints(:,1,1), imagePoints(:,2,1),"gx",MarkerSize=8) plot(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),"r+",MarkerSize=8) legend("Detected Points","ReprojectedPoints") hold off
입력 인수
이름-값 인수
선택적 인수 쌍을 Name1=Value1,...,NameN=ValueN으로 지정합니다. 여기서 Name은 인수 이름이고 Value는 대응값입니다. 이름-값 인수는 다른 인수 뒤에 와야 하지만, 인수 쌍의 순서는 상관없습니다.
R2021a 이전 릴리스에서는 쉼표를 사용하여 각 이름과 값을 구분하고 Name을 따옴표로 묶으십시오.
예: "WorldUnits","mm"는 세계 좌표 점 단위를 밀리미터로 설정합니다.
세계 좌표 점 단위로, 문자형 벡터 또는 string형 스칼라로 지정됩니다.
왜도 추정 여부로, 논리형 스칼라로 지정됩니다. 이 속성을 true로 설정하면 함수는 영상 좌표축 왜도를 추정합니다. false로 설정하면 영상 좌표축이 정확히 수직이 되고 함수는 왜도를 0으로 설정합니다.
추정할 방사 왜곡 계수의 개수로, 값 2 또는 3으로 지정됩니다.
방사 왜곡은 주점에서 확장되는 방사형 선을 따라 영상 점이 변위되는 것입니다.
영상 점이 주점에서 멀어질수록(양의 방사형 변위) 영상 배율이 감소하고 영상에 핀쿠션 왜곡이 발생합니다.
영상 점이 주점에 가까워질수록(음의 방사형 변위) 영상 배율이 증가하고 영상에 배럴 왜곡이 발생합니다.
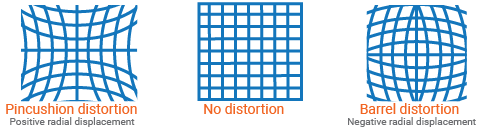
방사 왜곡 계수는 이러한 유형의 왜곡을 모델링합니다. 왜곡된 점은 (xdistorted, ydistorted)로 표기합니다.
xdistorted = x(1 + k1*r2 + k2*r4 + k3*r6)
ydistorted= y(1 + k1*r2 + k2*r4 + k3*r6)
x, y — 왜곡되지 않은 픽셀 위치입니다. x 및 y는 정규화된 영상 좌표에 있습니다. 정규화된 영상 좌표는 픽셀 좌표를 광학적 중심으로 평행 이동하고 초점 거리(단위: 픽셀)로 나누는 방법으로 계산됩니다. 따라서 x 및 y에는 차원이 없습니다.
k1, k2 및 k3 — 렌즈의 방사 왜곡 계수입니다.
r2 = x2 + y2
일반적으로, 두 계수로 충분히 보정이 가능합니다. 광각 렌즈에서와 같이 심각한 왜도가 발생하는 경우에는 k3를 포함하여 3개 계수를 선택할 수 있습니다.
접선 왜곡 플래그로, 논리형 스칼라로 지정됩니다. 이 속성을 true로 설정하면 함수는 접선 왜곡을 추정합니다. false로 설정하면 접선 왜곡이 무시됩니다.
접선 왜곡은 렌즈와 영상 평면이 평행이 아닌 경우에 발생합니다. 접선 왜곡 계수는 이러한 유형의 왜곡을 모델링합니다.

왜곡된 점은 (xdistorted, ydistorted)로 표기합니다.
xdistorted = x + [2 * p1 * x * y + p2 * (r2 + 2 * x2)]
ydistorted = y + [p1 * (r2 + 2 *y2) + 2 * p2 * x * y]
x, y — 왜곡되지 않은 픽셀 위치입니다. x 및 y는 정규화된 영상 좌표에 있습니다. 정규화된 영상 좌표는 픽셀 좌표를 광학적 중심으로 평행 이동하고 초점 거리(단위: 픽셀)로 나누는 방법으로 계산됩니다. 따라서 x 및 y에는 차원이 없습니다.
p1 및 p2 — 렌즈의 접선 왜곡 계수입니다.
r2 = x2 + y2
출력 인수
알고리즘
참고 문헌
[1]
[2]
[3] Bouguet, J.Y. “Camera Calibration Toolbox for Matlab”, Computational Vision at the California Institute of Technology.
[4] Bradski, G., and A. Kaehler. Learning OpenCV : Computer Vision with the OpenCV Library. Sebastopol, CA: O'Reilly, 2008.
버전 내역
R2014b에 개발됨참고 항목
앱
객체
함수
showReprojectionErrors|showExtrinsics|undistortImage|undistortPoints|detectCheckerboardPoints|generateCheckerboardPoints|patternWorldPoints|reconstructScene|rectifyStereoImages|disparityBM|disparitySGM|estimateStereoRectification|estimateFundamentalMatrix|estimateStereoBaseline