일반 응용 사례
Simulink®를 사용하여 광범위한 동적 시스템을 모델링하고 시뮬레이션할 수 있습니다. 이 예제 모델은 단순한 것부터 복잡한 것에 이르기까지 다양한 일반 응용 사례를 보여줍니다.
추천 예제

튀어 오르는 공 시뮬레이션
이 예제에서는 두 개의 튀어 오르는 공 모델을 사용하여 제논 동작으로 하이브리드 동적 시스템을 모델링하는 여러 접근 방식을 보여줍니다. 보통, 특정 하이브리드 시스템에서 유한한 시간 간격 내에 무한한 수의 이벤트가 발생할 때 이를 제논 동작이라고 합니다. 공의 에너지가 감소함에 따라, 공은 점점 더 짧은 시간 간격으로 지면과 충돌합니다.
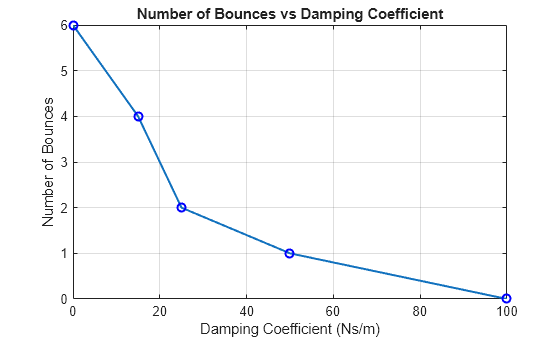
Analyze Impact of Model Parameters on Bouncing Ball Simulation
Analyzes the impact of the damping coefficient on a mass-spring-damper model of the dynamics of a bouncing ball. The example runs a set of simulations. Each simulation uses a different value of the parameter that represents the damping coefficient. By visualizing and postprocessing the results of the simulations, the example explores these questions:
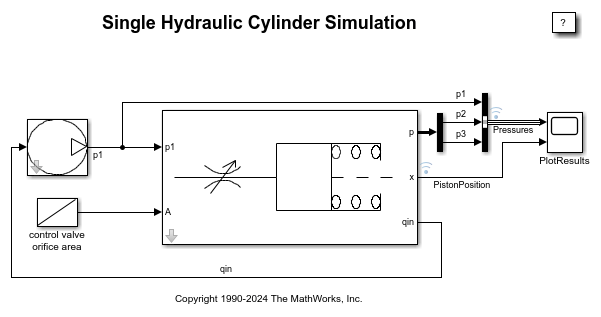
단일 유압 실린더 시뮬레이션
이 예제에서는 Simulink®를 사용하여 유압 실린더를 모델링하는 방법을 보여줍니다. 이러한 개념은 유압 거동을 모델링해야 하는 응용 사례에 적용할 수 있습니다.

주택의 열 모델
이 예제에서는 Simulink®를 사용하여 주택의 열 모델을 만드는 방법을 보여줍니다. 이 시스템에서는 실외 환경과 집의 열 특성, 그리고 집의 난방 시스템을 모델링합니다.
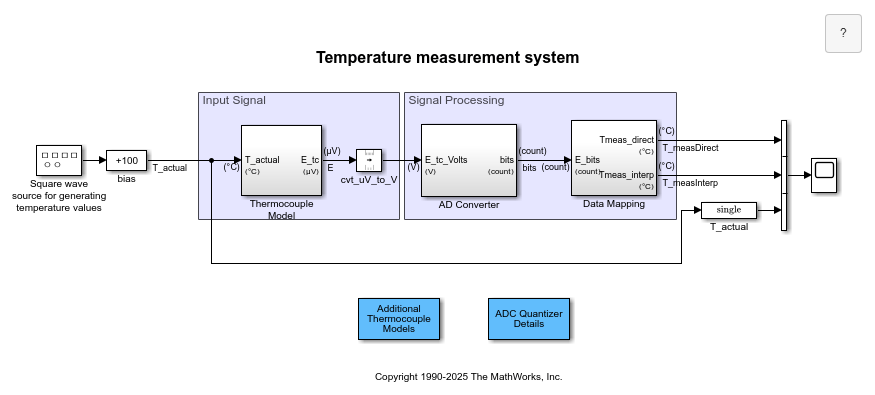
Temperature Measurement System Using Nonlinear Behavioral Data of Type S Thermocouple
Build and simulate a temperature measurement system that uses a nonlinear dataset describing the behavior of a type S thermocouple.
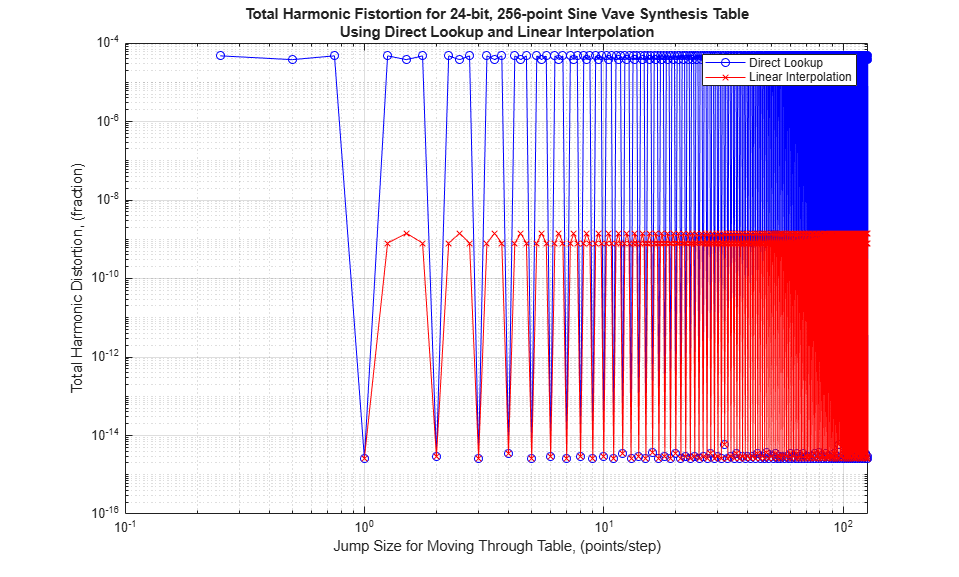
디지털 파형 생성: 사인파 근사하기
이 예제에서는 임베디드 시스템 및 임의 파형 생성 계측기의 디지털 파형 합성 응용 사례에서 사용하기 위해 사인파 데이터 테이블을 설계하고 그 값을 계산하는 방법을 보여줍니다.

정확한 영점교차 검출
이 예제에서는 Simulink®에서 영점교차 검출이 어떻게 작동하는지 보여줍니다. Simulink는 영점교차 검출을 사용하여 솔버 시간 스텝을 줄이지 않고도 모델의 급격한 변화나 불연속을 정확하게 시뮬레이션합니다. 자세한 내용은 Zero-Crossing Detection 항목을 참조하십시오.

Spiral Galaxy Formation Simulation Using MATLAB Function Blocks
Use MATLAB Function blocks to simulate and plot galaxy interactions.
Counters Using Conditionally Executed Subsystems
Implement counters using Enabled and Triggered subsystems. In this example, the model sldemo_counters controls flow of water into a tank and uses a counter to count the number of times overflow occurs, where overflow occurs when the water level in the tank is 8 meters or more for 30 seconds or more.

질량-스프링-댐퍼 시스템에서 스틱-슬립 마찰과 강제 정지 모델링하기
이 예제에서는 스틱 슬립 운동의 강제 정지와 마찰 변화를 질량-스프링-댐퍼 모델에 통합할 수 있는 한 가지 방법을 보여줍니다.

시간 논리를 사용하는 뱅뱅 제어
이 예제에서는 Stateflow®를 사용하여 보일러용 뱅뱅(bang-bang) 온도 제어 시스템을 모델링하는 방법을 보여줍니다. 보일러 동특성은 Simulink®에 모델링되어 있습니다.

애니메이션을 사용한 역진자
이 예제에서는 Simulink®를 사용하여 역진자 시스템을 모델링하고 애니메이션으로 나타내는 방법을 보여줍니다. 역진자의 질량 중심은 피벗 점보다 위에 있습니다. 시스템은 이 자세를 안정적으로 유지하기 위해 진자가 쓰러지기 시작할 때 피벗 점을 질량 중심 아래로 이동시키는 제어 논리를 구현합니다. 역진자는 제어 전략을 테스트하는 데 사용되는 고전적인 동역학 문제입니다.

이중 스프링 질량 시스템
이 예제에서는 주기적으로 변하는 강제 함수를 사용하여 이중 스프링 질량 시스템을 모델링하는 방법을 보여줍니다. 이 모델은 State-Space 블록을 사용하여 플랜트와 추정기를 나타내고 Level-2 MATLAB S-Function 블록을 사용하여 시뮬레이션 중에 질량 시스템을 애니메이션으로 보여줍니다. 센서와 액추에이터는 왼쪽 질량에 연결되어 있습니다. 이 예제는 상태 추정과 선형-2차 조절기(LQR) 제어를 사용합니다.

애니메이션을 사용한 탱크 채우기 및 비우기
이 예제에서는 탱크 내 액체의 동역학을 모델링하는 방법을 보여줍니다. 모델은 액체의 유입과 유출을 시뮬레이션합니다.

가변 전송 지연 현상으로 시스템 시뮬레이션하기
이 예제에서는 Simulink®를 사용하여 가변 전송 지연 현상을 모델링할 수 있는 두 가지 사례를 보여줍니다.
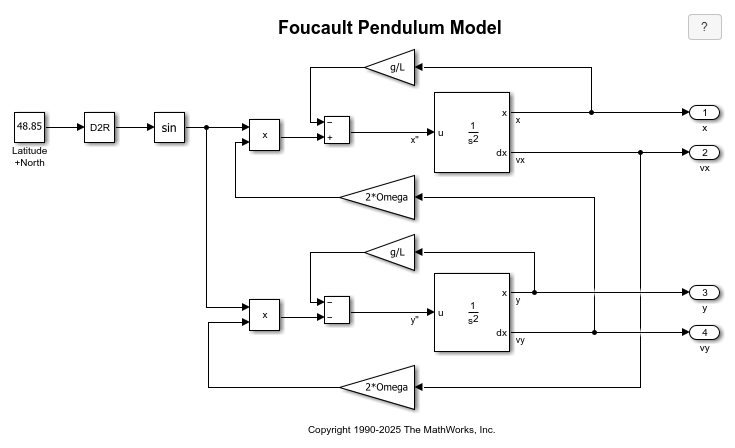
Foucault Pendulum Model
Model a Foucault pendulum. The Foucault pendulum was the brainchild of the French physicist Leon Foucault. It was intended to prove that Earth rotates around its axis. The oscillation plane of a Foucault pendulum rotates throughout the day as a result of the axial rotation of the Earth. The plane of oscillation completes a whole circle in a time interval T, which depends on the geographical latitude.

Simulink 3D Animation을 사용한 푸코의 진자 모델
이 예제에서는 Simulink® 3D Animation™ 환경에서 Foucault Pendulum Model을 애니메이션으로 표시하는 방법을 보여줍니다. 모델의 Latitude 상수 값과 MATLAB® 작업 공간에 있는 다른 파라미터를 변경하여 진자의 위치를 수정할 수 있습니다.
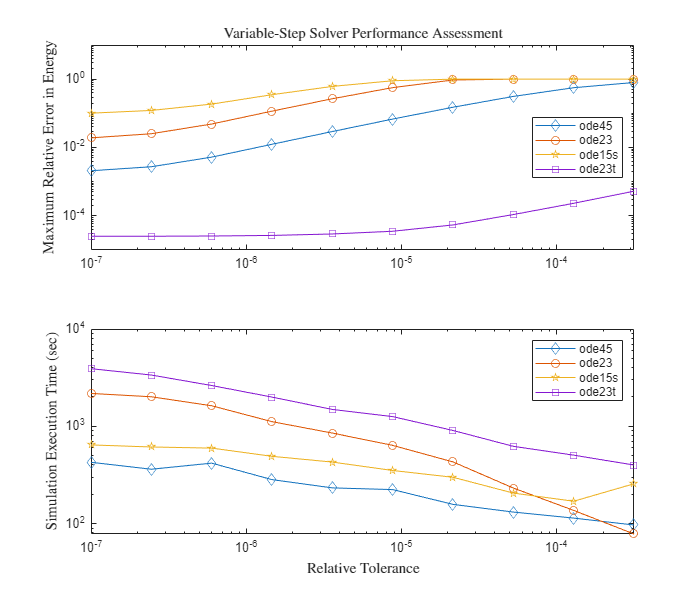
경직성(Stiff) 모델로 가변 스텝 솔버 탐색하기
이 예제에서는 푸코의 진자(Foucault pendulum) 모델에서 가변 스텝 솔버가 어떻게 동작하는지 보여줍니다. Simulink® 솔버 ode45, ode15s, ode23, ode23t를 테스트 케이스로 사용합니다. 이 문제의 해를 구하는 데는 경직성 미분 방정식이 사용됩니다. 방정식의 경직성에 관한 정확한 정의는 없습니다. 일부 수치적 방법은 경직성 방정식의 해를 구하는 데 사용하기에 불안정하며 경직성 문제에 대해 수치적으로 안정된 해를 구하기 위해서는 아주 작은 스텝 크기가 필요합니다. 경직성 문제는 빠르게 변하는 성분을 가질 수도 있고 느리게 변하는 성분을 가질 수도 있습니다.
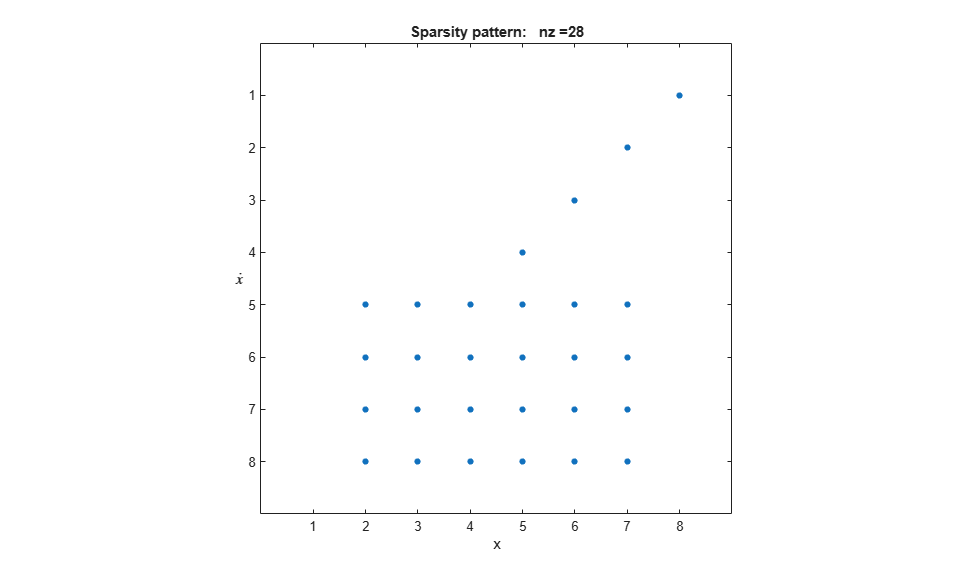
Exploring the Solver Jacobian Structure of a Model
The example shows how to use Simulink® to explore the solver Jacobian sparsity pattern, and the connection between the solver Jacobian sparsity pattern and the dependency between components of a physical system. A Simulink model that models the synchronization of three metronomes placed on a free moving base are used.
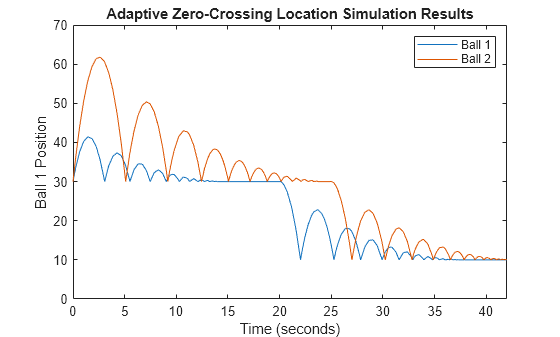
Use Adaptive Zero-Crossing Location for More Robust Simulations
How the adaptive algorithm for zero-crossing location can improve simulation speed and robustness for systems that exhibit Zeno behavior, such as chattering.

Four Hydraulic Cylinder Simulation
Use Simulink to create a model with four hydraulic cylinders. The model has a single pump and four actuators.

Two Cylinder Model with Load Constraints
Use Simulink to model a rigid rod supporting a large mass interconnecting two hydraulic actuators. This model eliminates the springs as it applies the piston forces directly to the load.
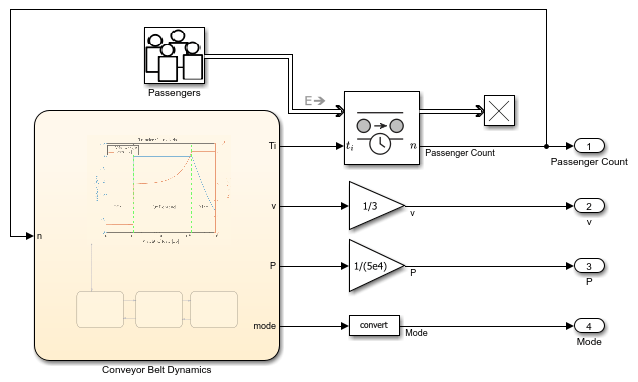
Model Conveyor Belt as Cyber-Physical System
Model a variable-speed conveyor belt as a cyber-physical system by combining continuous-time, discrete-event, and finite-state modeling techniques. The model in this example integrates the modeling techniques required to represent the cyber-physical system into a single simulation environment by using Simulink®, SimEvents®, and Stateflow®.

스프링 질량 댐퍼 시스템의 동력 분석하기
질량-스프링 댐퍼 시스템의 기계적 동력을 분석합니다.

반데르폴 발진기
이 예제에서는 Simulink®에서 2계 반데르폴(VDP) 미분 방정식을 모델링하는 방법을 보여줍니다. 동역학에서 VDP 발진기는 비보존적이고 비선형인 감쇠를 갖습니다. 높은 진폭에서 발진기는 에너지를 소비합니다. 낮은 진폭에서 발진기는 에너지를 생성합니다. 발진기는 다음 2계 미분 방정식으로 지정됩니다.
자율 수상 선박의 충돌 회피 및 궤적 추종
미리 정의된 궤적을 따르면서 충돌을 회피합니다.