애니메이션을 사용한 역진자
이 예제에서는 Simulink®를 사용하여 역진자 시스템을 모델링하고 애니메이션으로 나타내는 방법을 보여줍니다. 역진자의 질량 중심은 피벗 점보다 위에 있습니다. 시스템은 이 자세를 안정적으로 유지하기 위해 진자가 쓰러지기 시작할 때 피벗 점을 질량 중심 아래로 이동시키는 제어 논리를 구현합니다. 역진자는 제어 전략을 테스트하는 데 사용되는 고전적인 동역학 문제입니다.
시스템
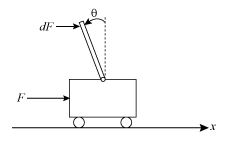
이 예제에서 시스템은 움직이는 카트에 탑재된 역진자로 구성됩니다. 이 모델은 운동을 수직 평면으로 제한합니다. 이 모델은 시스템 안정성을 유지하기 위해 카트 위치를 추적하는 상태 피드백 제어를 구현합니다. Simulink에서 방정식이 도출되고 구현되는 방법에 대한 설명은 Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox) 항목을 참조하십시오.

역진자 동역학
이 모델은 마스크 처리된 서브시스템을 사용하여 역진자 비선형 시스템 동역학을 구현합니다. 이 서브시스템은 x축을 따라 카트 위치를 결정하고 피벗 점을 중심으로 진자 회전을 결정합니다.

상태 피드백 제어
이 모델은 상태 피드백 제어를 구현하여 카트의 위치를 추적하고 피벗 점이 진자의 질량 중심 아래에 있도록 유지합니다. Kalman filter는 시스템의 내부 상태를 추정하는 데 사용됩니다.
애니메이션 및 분석
이 모델은 Level-2 MATLAB S-Function 블록을 사용하여 애니메이션을 구현합니다. S-Function은 MATLAB® Handle Graphics®를 사용합니다. S-Function을 보려면 pendan.m을 여십시오. Pendulum Animation 창에서 슬라이더 막대를 사용하여 카트 위의 진자 피벗 점을 이동합니다. 이 모델은 시스템 안정성을 유지하기 위해 관측기 기반 상태 피드백 제어를 구현합니다. 아래 그림은 역진자 시스템의 시간 영역 응답을 보여줍니다. 첫 번째 서브플롯은 기준 위치와 실제 카트 위치를 비교하여 시간에 따른 추종 성능을 보여줍니다. 두 번째 서브플롯은 진자의 각변위(단위: 라디안)를 나타내며 제어 과정 동안 진자 각도가 어떻게 변화하는지 보여줍니다. 시뮬레이션 데이터 인스펙터를 사용하여 기록된 신호를 조사할 수도 있습니다.


참고 항목
Level-2 MATLAB S-Function | Discrete PID Controller | Signal Generator
도움말 항목
- Add App Designer App to Inverted Pendulum Model (Simulink Real-Time)
- Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox)
- 카트의 역진자 제어 (Control System Toolbox)
- 역진자 제어기 조정 (Simulink Design Optimization)
- 마스크 처리 기본 사항
- Save Signal Data Using Signal Logging
- Unit Specification in Simulink Models