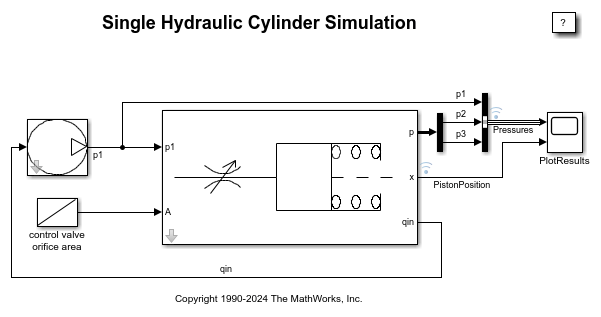
단일 유압 실린더 시뮬레이션
이 예제에서는 Simulink®를 사용하여 유압 실린더를 모델링하는 방법을 보여줍니다. 이러한 개념은 유압 거동을 모델링해야 하는 응용 사례에 적용할 수 있습니다.
모델 분석 및 물리학
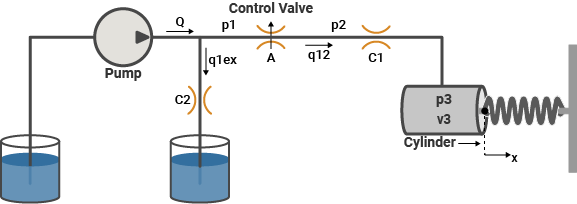
이 개략도는 유압 실린더의 모델을 보여줍니다. 이 모델은 펌프 유량 Q를 보내 공급 압력 p1을 형성하고, 여기서 층류 q1ex가 배기로 누설됩니다. 피스톤/실린더 어셈블리의 제어 밸브는 가변 면적 오리피스를 통과하는 난류로 모델링됩니다. 이 밸브를 통과하는 유량 q12는 중간 압력 p2를 생성하고, 이 압력은 액추에이터 실린더로 연결되는 라인을 따라 후속적으로 강하됩니다. 실린더 압력 p3이 스프링 하중에 저항하여 피스톤을 움직이고, 그 결과 위치 x로 결정됩니다.
펌프 출력에서 유량이 누설로 보내지는 부분과 제어 밸브로 보내지는 부분으로 나뉩니다. 모델은 방정식 세트 1의 수식을 사용하여 누설 q1ex를 층류로 시뮬레이션합니다.
방정식 세트 1








모델은 제어 밸브를 통과하는 난류를 시뮬레이션하기 위해 오리피스 방정식을 구현합니다. 부호 함수와 절댓값 함수는 방정식 세트 2에 나와 있는 것처럼 양방향 흐름을 처리할 수 있도록 합니다.
방정식 세트 2





실린더 내부의 유체는 유체 유량 q12 = q23에 의해 압력이 증가하며, 여기에 피스톤 운동으로 인한 컴플라이언스 효과를 감산으로 반영합니다. 모델은 방정식 세트 3의 방정식을 사용하여 유체 유량과 유량 압축률을 구현합니다.
방정식 세트 3
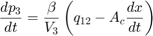






유압력이 크기 때문에 피스톤 질량과 스프링 질량은 모델에서 무시됩니다. 이 연립방정식은 이 관계를 미분하고 p2와 p3 간의 압력 강하를 반영하여 구성됩니다.
방정식 세트 3은 밸브에서 액추에이터로의 층류를 모델링합니다. 방정식 세트 4는 피스톤에서의 힘 평형을 부여합니다.
방정식 세트 4






시뮬레이션 실행하기
시뮬레이션을 실행하려면 Simulink 툴스트립에서 실행을 클릭합니다.
시뮬레이션 중에 모델은 관련 데이터를 MATLAB 작업 공간에 Simulink.SimulationOutput 객체 out으로 기록합니다. 신호 기록 데이터는 out 객체의 sldemo_hydcyl_output이라는 구조체에 저장됩니다. 기록된 신호에는 파란색 배지가 있습니다.
Pump 서브시스템
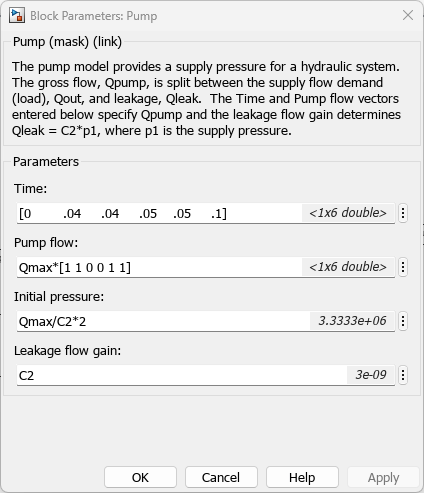
Pump 서브시스템 마스크 내부를 탐색하려면 Pump 서브시스템을 마우스 오른쪽 버튼으로 클릭하고 마스크 편집 > 마스크 내부 탐색을 선택합니다. 펌프 모델은 펌프 유량과 부하(출력) 유량의 함수로 공급 압력을 계산합니다. Qpump는 펌프 유량 데이터로, 모델 작업 공간에 저장됩니다. 시간 지점과 그에 대응하는 유량으로 구성된 열 벡터를 갖는 행렬 [T,Q]가 유량 데이터를 지정합니다. 모델은 방정식 세트 1에 나와 있는 대로 압력 p1을 계산합니다. Qout = q12가 제어 밸브를 통한 p1의 직접 함수이므로 대수 루프가 형성됩니다. 초기값 p10의 추정값을 사용하면 더 효율적인 해를 구할 수 있습니다.
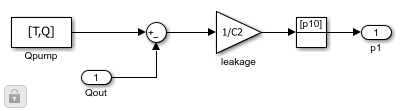
'Pump' 서브시스템 마스크를 사용하여 T, Q, p10, C2 파라미터에 액세스하고 이를 변경할 수 있습니다.
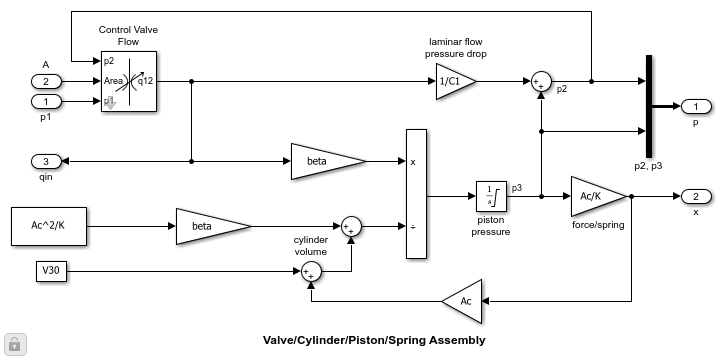
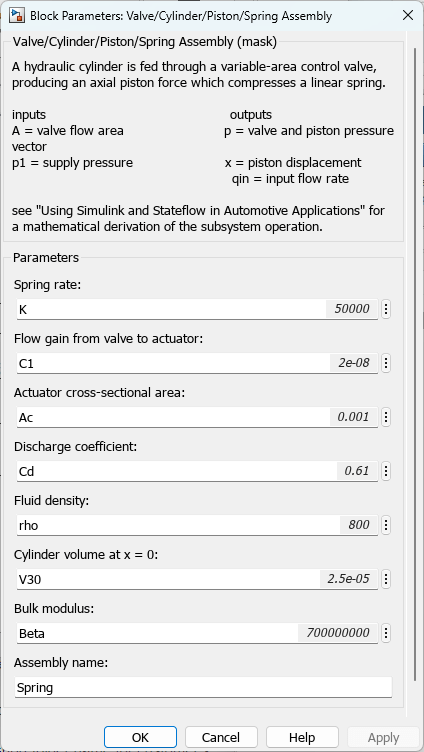
Valve/Cylinder/Piston/Spring Assembly 서브시스템
Actuator 서브시스템을 보려면 마스크 처리된 Valve/Cylinder/Piston/Spring Assembly 서브시스템을 마우스 오른쪽 버튼으로 클릭하고 마스크 편집 > 마스크 내부 탐색을 선택합니다. 연립미분대수방정식은 압력 p3을 사용하여 실린더 가압을 모델링하고, 이 압력은 방정식 세트 3에서 도함수로 표시되고 상태(적분기)로 사용됩니다. 피스톤 질량이 무시되면, 스프링 힘과 피스톤 위치는 p3에 직접 비례(배수)하고, 속도는 p3의 시간 도함수에 직접 비례(배수)합니다. 후자 관계는 Beta Gain 블록 주위에 대수 루프를 형성합니다. 중간 압력 p2는 p3과 밸브에서 실린더로의 유량으로 인한 압력 강하의 합(방정식 세트 4)입니다. 이 관계는 제어 밸브와 1/C1 이득을 통한 대수 제약 조건도 적용합니다.
제어 밸브 서브시스템은 오리피스(방정식 세트 2)를 계산합니다. 제어 밸브 서브시스템은 업스트림 압력과 다운스트림 압력 및 가변 오리피스 면적을 입력으로 사용합니다. Control Valve Flow 서브시스템은 다음과 같이 부호 있는 제곱근을 계산합니다.

이 서브시스템은 세 개의 비선형 함수를 구현하는데, 그 중 두 개는 불연속입니다. 그러나 이들을 함께 사용하면 y는 u의 연속 함수가 됩니다.
결과
모델 시뮬레이션에는 MAT 파일 sldemo_hydcyl_data.mat에서 불러온 데이터가 사용됩니다. Pump 마스크 및 Cylinder 마스크를 통해 파라미터 값을 변경할 수 있습니다.








T = [0 0.04 0.04 0.05 0.05 0.1 ] sec
Q = [0.005 0.005 0 0 0.005 0.005] (m^3)/sec
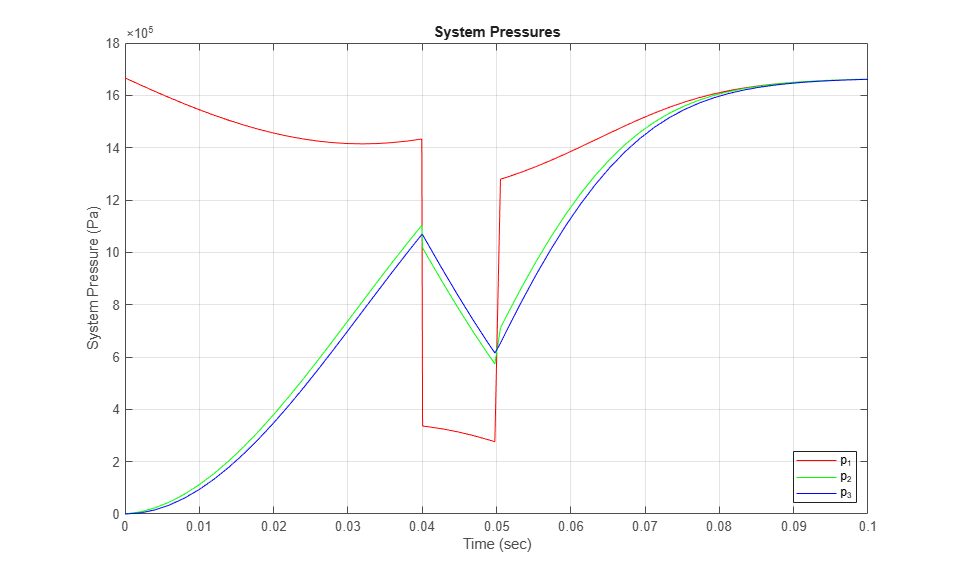
시뮬레이션 결과 플로팅하기
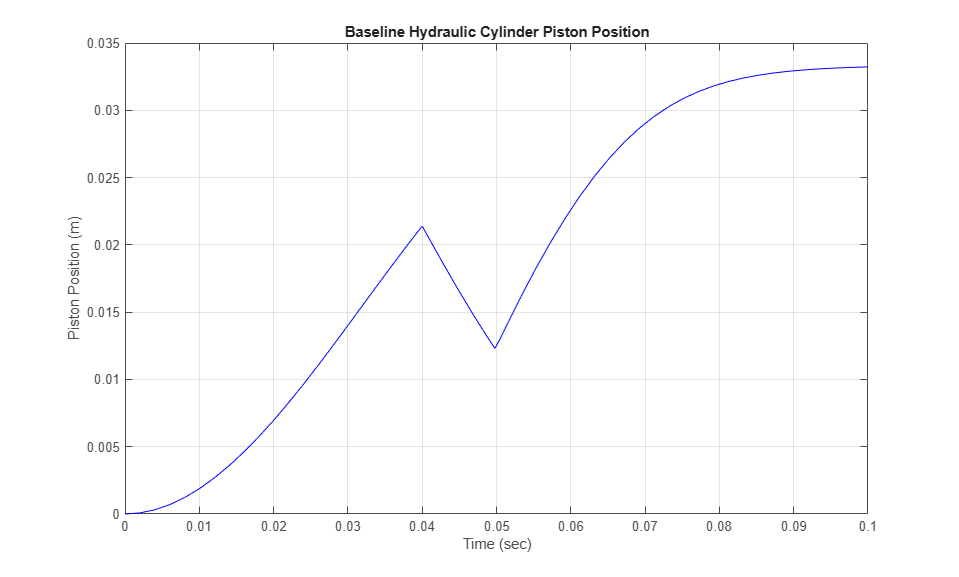
시스템에서 초기에는 펌프 유량이 0.005 m^3/sec = 300 l/min으로 증가하고, t=0.04 sec에서 0이 된 다음, t=0.05 sec에서 초기 유량으로 복원됩니다.
제어 밸브는 오리피스 면적 0으로 시작하여 0.1초의 시뮬레이션 시간 동안 1e-4 m^2까지 증가합니다. 밸브가 닫히면 모든 펌프 유량이 누설되므로 초기 펌프 압력이 p10 = Q/C2 = 1667 kPa로 상승합니다.
밸브가 열리면 압력 p2와 p3은 상승하고 부하 증가에 따라 p1은 감소합니다. 펌프 유량이 차단되면 스프링과 피스톤이 누산기처럼 동작하고 p3이 지속적으로 감소합니다. 그 다음에 유량 방향이 반대가 되어 p2는 p3과 비교적 가까운 값을 유지하면서도 감소합니다. 펌프 자체에서는 역류가 모두 누설되어 p1이 떨어집니다. 유량이 다시 공급되면 이러한 동작이 반대로 진행됩니다.
피스톤 위치는 p3에 정비례하며, 여기서 유압력과 스프링 힘이 평형을 이룹니다. 0.04초와 0.05초에서 나타나는 속도의 불연속성은 질량이 무시됨을 나타냅니다. 모델은 다시 펌프 유량이 모두 누설될 때 정상 상태에 도달하며, 이때 p3 = p2 = p1 = p10이 되어 제어 밸브 양단 간의 압력 강하가 0이 됩니다.
피스톤 위치를 플로팅합니다(코드는 숨겨져 있음).