Velocity Product Torque
속도에서 유발된 힘을 상쇄하는 조인트 토크

라이브러리:
Robotics System Toolbox /
Manipulator Algorithms
설명
Velocity Product Torque 블록은 강체 트리 로봇 모델의 로봇 컨피규레이션(조인트 위치)과 조인트 속도가 주어졌을 때, 그 속도에서 야기된 힘을 상쇄하는 토크를 반환합니다.
예제
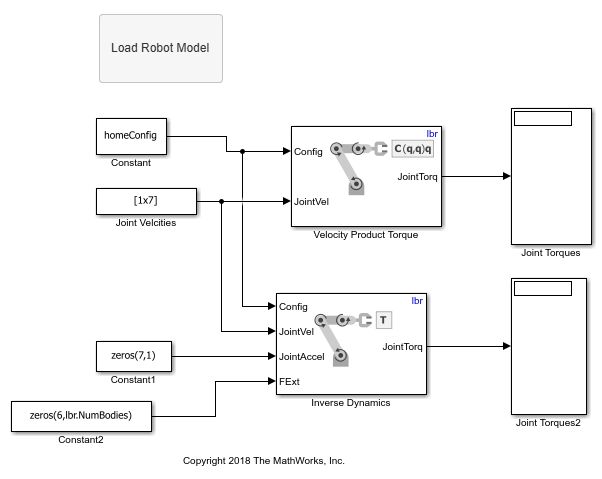
Simulink에서 매니퓰레이터의 속도 곱 계산하기
Simulink® 매니퓰레이터 알고리즘 블록을 사용하여 매니퓰레이터의 속도에서 유발된 토크를 계산합니다.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2018a에 개발됨