Inverse Dynamics
주어진 모션에 필요한 조인트 토크

라이브러리:
Robotics System Toolbox /
Manipulator Algorithms
설명
Inverse Dynamics 블록은 로봇이 지정된 로봇 상태를 유지하는 데 필요한 조인트 토크를 반환합니다. 필요한 조인트 토크를 구하려면 로봇 컨피규레이션(조인트 위치), 조인트 속도, 조인트 가속도, 외력을 지정합니다.
예제

Simulink에서 매니퓰레이터 중력 동역학 계산하기
매니퓰레이터 알고리즘 블록을 사용하여 매니퓰레이터 로봇에 작용하는 중력으로 인한 동역학을 계산하고 비교합니다.
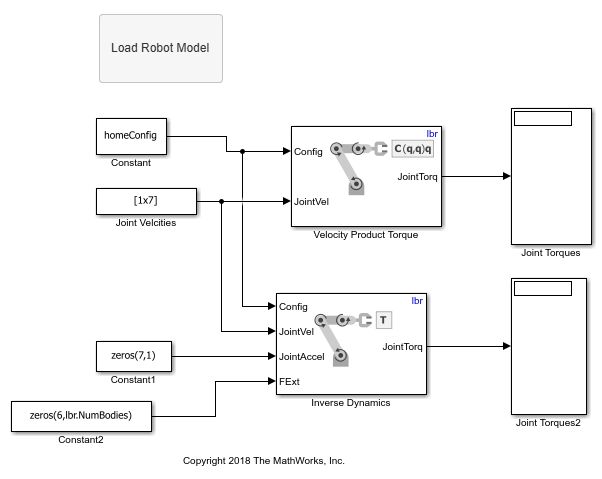
Simulink에서 매니퓰레이터의 속도 곱 계산하기
Simulink® 매니퓰레이터 알고리즘 블록을 사용하여 매니퓰레이터의 속도에서 유발된 토크를 계산합니다.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2018a에 개발됨