이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
Inverse Kinematics
엔드 이펙터 자세를 구현하기 위한 조인트 컨피규레이션 계산
라이브러리:
Robotics System Toolbox /
Manipulator Algorithms
설명
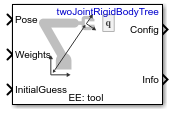
Inverse Kinematics 블록은 역기구학(IK) 솔버를 사용하여 지정된 강체 트리 모델을 기반으로 원하는 엔드 이펙터 자세에 대한 조인트 컨피규레이션을 계산합니다. rigidBodyTree 클래스를 사용하여 로봇의 강체 트리 모델을 만듭니다. 이 강체 트리 모델은 솔버가 적용하는 모든 조인트 제약 조건을 정의합니다.
블록 마스크 내부에서 RigidBodyTree 파라미터와 원하는 엔드 이펙터를 지정합니다. 또한 솔버 파라미터 탭에서 알고리즘 파라미터를 조정할 수 있습니다.
원하는 엔드 이펙터 Pose, 자세 허용오차에 대한 Weights, 조인트 컨피규레이션의 InitialGuess을 입력합니다. 솔버는 솔버 파라미터 탭에서 지정한 허용오차 내에서 엔드 이펙터 자세를 충족하는 로봇 컨피규레이션 Config를 출력합니다.
예제
Simulink에서 역기구학으로 엔드 이펙터 궤적 추적하기
Simulink®에서 역기구학을 계산하여 강체 로봇 모델이 정의된 엔드 이펙터 궤적을 추적하도록 합니다.
포트
입력
출력
파라미터
참고 문헌
[1] Badreddine, Hassan, Stefan Vandewalle, and Johan Meyers. "Sequential Quadratic Programming (SQP) for Optimal Control in Direct Numerical Simulation of Turbulent Flow." Journal of Computational Physics. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, Dimitri P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999.
[3] Goldfarb, Donald. "Extension of Davidon’s Variable Metric Method to Maximization Under Linear Inequality and Equality Constraints." SIAM Journal on Applied Mathematics. Vol. 17, No. 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Jorge, and Stephen Wright. Numerical Optimization. New York, NY: Springer, 2006.
[5] Sugihara, Tomomichi. "Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method." IEEE Transactions on Robotics. Vol. 27, No. 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Zhao, Jianmin, and Norman I. Badler. "Inverse Kinematics Positioning Using Nonlinear Programming for Highly Articulated Figures." ACM Transactions on Graphics. Vol. 13, No. 4 (1994): 313–36. doi:10.1145/195826.195827.