이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
inverseKinematics
역기구학 솔버 만들기
설명
inverseKinematics System object™는 역기구학(IK) 솔버를 만들어 지정된 강체 트리 모델을 기반으로 원하는 엔드 이펙터 자세에 대한 조인트 컨피규레이션을 계산합니다. rigidBodyTree 클래스를 사용하여 로봇의 강체 트리 모델을 만듭니다. 이 모델은 솔버가 적용하는 모든 조인트 제약 조건을 정의합니다. 해를 구하는 것이 가능한 경우 로봇 모델에 지정된 조인트 제한을 준수합니다.
엔드 이펙터 자세 외에 조준 제약 조건, 위치 경계, 방향 타깃 등 더 많은 제약 조건을 지정하려면 generalizedInverseKinematics를 사용해 보십시오. 이 객체를 사용하면 다중 제약 조건이 있는 IK 해를 계산할 수 있습니다.
닫힌 형식의 해석적 IK 해에 관해서는 analyticalInverseKinematics 항목을 참조하십시오.
원하는 엔드 이펙트 자세를 위한 조인트 컨피규레이션을 계산하려면 다음을 수행합니다.
inverseKinematics객체를 만들고 속성을 설정합니다.함수를 호출하는 것처럼 인수를 사용하여 객체를 호출합니다.
System object의 작동 방식에 대해 자세히 알아보려면 System object란? 항목을 참조하십시오.
생성
설명
ik = inverseKinematicsRigidBodyTree 속성에 강체 트리 모델을 지정합니다.
ik = inverseKinematics(PropertyName=Value)SolverAlgorithm="fminconsqp"는 fmincon SQP 솔버를 역기구학 솔버로 사용합니다.
속성
사용
설명
[는 지정된 엔드 이펙터 자세를 구현하는 조인트 컨피규레이션을 구합니다. 컨피규레이션에 대한 초기 추측값과 configSol,solInfo] = ik(endeffector,pose,weights,initialguess)pose의 6개 성분의 허용오차에 대해 원하는 가중치를 지정합니다. 알고리즘 실행과 관련된 해 정보 solInfo는 조인트 컨피규레이션 해 configSol과 함께 반환됩니다.
입력 인수
출력 인수
객체 함수
객체 함수를 사용하려면 System object를 첫 번째 입력 인수로 지정하십시오. 예를 들어 obj라는 System object의 시스템 리소스를 해제하려면 다음 구문을 사용합니다.
release(obj)
예제
로봇을 불러오고 로봇의 역기구학 솔버를 만듭니다. 솔버 알고리즘을 fmincon SQP 알고리즘으로 설정합니다.
robot = loadrobot("universalUR5",DataFormat="row"); ik = inverseKinematics(RigidBodyTree=robot,SolverAlgorithm="fminconsqp");
로봇의 마지막 바디를 엔드 이펙터로 설정하고, 타깃 자세를 설정하고, 가중치를 설정하고, 초기 추측 컨피규레이션을 설정합니다.
ee = robot.BodyNames{end};
poseTarget = se3([0 pi/2 -pi/2],"eul","ZYX",[0 0.7 0.3]);
weights = [1 1 1 0.8 0.8 0.8];
initGuessConfig = [pi/2 0 0 0 0 0];초기 추측 컨피규레이션에 있는 로봇을 표시하고 타깃 자세를 플로팅합니다.
show(robot,initGuessConfig); axis([-0.5 0.5 -0.1 0.9 -0.1 0.8]) hold on plotTransforms(poseTarget,FrameSize=0.2); title("Initial Guess Configuration and Pose Target")
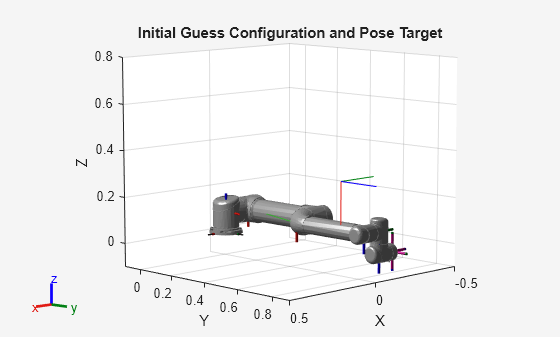
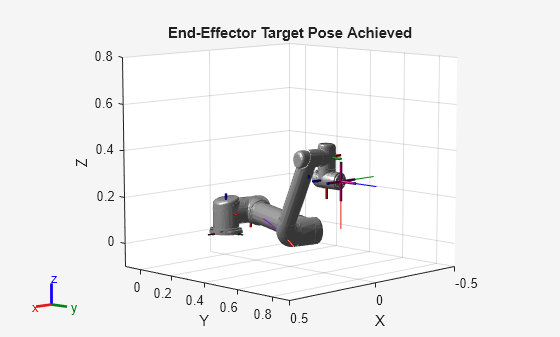
지정된 가중치와 초기 추측 컨피규레이션을 사용하여 자세 타깃에 도달하는 컨피규레이션을 구합니다.
[config,solninfo] = ik(ee,tform(poseTarget),weights,initGuessConfig); show(robot,config,PreservePlot=false); title("End-Effector Target Pose Achieved") hold off
solninfo.Status
ans = 'success'
Robotics System Toolbox™ loadrobot에서 PUMA 560 매니퓰레이터를 불러와 Figure에 로봇 모델을 표시합니다.
puma = loadrobot("puma560"); show(puma,homeConfiguration(puma),PreservePlot=false); axis([-1 1 -1 1 0 2]) title("PUMA 560 Home Configuration")

로봇의 엔드 이펙터가 도달해야 하는 목표 자세는 [-0.5 0.5 0.75]입니다. 역기구학은 목표 자세를 사용하여 조인트 컨피규레이션을 구하므로 먼저 목표 평행 이동을 사용하여 위치를 SE(3) 동차 변환 행렬로 변환합니다. 그런 다음 자세 변환을 플로팅합니다.
pos = [-0.5 0.5 0.75]; poseTF = trvec2tform(pos); hold on plotTransforms(pos,eul2quat([0 0 0]),FrameSize=0.2); title("PUMA 560 and End-Effector Target Position")

puma 로봇 모델에 대한 inverseKinematics System object™를 만듭니다. 자세의 회전과 위치에 대한 가중치를 지정합니다. 엔드 이펙터가 방향에 대한 제약 조건 없이 해당 위치에 도달하는 것이 목표이므로, 방향 각도의 가중치를 0으로 설정하여 IK 솔버에서 방향에 대한 해가 영향을 미치지 않도록 합니다. 로봇의 홈 컨피규레이션을 초기 추측값으로 사용합니다.
ik = inverseKinematics("RigidBodyTree",puma);
weights = [0 0 0 1 1 1];
initialguess = homeConfiguration(puma);ik System object를 사용하여 조인트 위치를 계산합니다. 로봇 모델에서 마지막 링크 link7을 엔드 이펙터로 사용합니다.
[configSoln,solnInfo] = ik("link7",poseTF,weights,initialguess);생성된 해 컨피규레이션을 표시해 보면 목표 위치에 도달하는 것을 확인할 수 있습니다.
show(puma,configSoln,PreservePlot=false);
title("End-Effector Target Position Achieved")
한 가지 유의할 점은 대부분의 IK 문제에서 목표 자세에 도달하는 컨피규레이션이 여러 개 있을 수 있다는 것입니다. 솔버는 최적화 기반이기 때문에 솔버가 접근하는 해가 실제로는 목표 자세에 도달하지 않을 수 있습니다. 이 경우 솔버는 자동으로 재시작되고 무작위 컨피규레이션을 초기 추측값으로 사용합니다. 이는 동일한 자세 타깃에 대해 함수를 두 번 이상 실행하면 각각이 모두 목표 자세에 도달하는 서로 다른 컨피규레이션을 생성할 수 있다는 의미입니다. 임의성을 피하려면 난수 생성기 시드값을 설정할 수도 있고, AllowRandomRestart를 비활성화한 상태에서 해에 더 가까운 초기 추측값을 사용할 수도 있습니다.
ik.SolverParameters.AllowRandomRestart = false
가능한 해를 모두 구해야 하는 경우 analyticalInverseKinematics 객체를 사용하십시오.
참고 문헌
[1] Badreddine, Hassan, Stefan Vandewalle, and Johan Meyers. "Sequential Quadratic Programming (SQP) for Optimal Control in Direct Numerical Simulation of Turbulent Flow." Journal of Computational Physics. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, Dimitri P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999.
[3] Goldfarb, Donald. "Extension of Davidon’s Variable Metric Method to Maximization Under Linear Inequality and Equality Constraints." SIAM Journal on Applied Mathematics. Vol. 17, No. 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Jorge, and Stephen Wright. Numerical Optimization. New York, NY: Springer, 2006.
[5] Sugihara, Tomomichi. "Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method." IEEE Transactions on Robotics Vol. 27, No. 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Zhao, Jianmin, and Norman I. Badler. "Inverse Kinematics Positioning Using Nonlinear Programming for Highly Articulated Figures." ACM Transactions on Graphics Vol. 13, No. 4 (1994): 313–36. doi:10.1145/195826.195827.