evaluate
문제의 최적화 표현식이나 목적 함수 및 제약 조건의 평가
설명
evaluate를 사용하여 한 점에서 최적화 표현식의 숫자형 값을 구하거나, 하나의 점 집합에서 최적화 문제, 방정식 문제 또는 최적화 제약 조건의 목적 함수 표현식과 제약 조건 표현식의 값을 구합니다.
팁
전체 워크플로는 문제 기반 최적화 워크플로 또는 방정식 풀이를 위한 문제 기반 워크플로 항목을 참조하십시오.
예제
두 변수의 최적화 표현식을 만듭니다.
x = optimvar("x",3,2); y = optimvar("y",1,2); expr = sum(x,1) - 2*y;
점에서 표현식을 평가합니다.
xmat = [3,-1;
0,1;
2,6];
sol.x = xmat;
sol.y = [4,-3];
val = evaluate(expr,sol)val = 1×2
-3 12
두 최적화 변수 x 및 y를 만들고 이러한 변수로 3×2 제약 조건 표현식을 생성합니다.
x = optimvar("x"); y = optimvar("y"); cons = optimconstr(3,2); cons(1,1) = x^2 + y^2/4 <= 2; cons(1,2) = x^4 - y^4 <= -x^2 - y^2; cons(2,1) = x^2*3 + y^2 <= 2; cons(2,2) = x + y <= 3; cons(3,1) = x*y + x^2 + y^2 <= 5; cons(3,2) = x^3 + y^3 <= 8;
점 , 에서 제약 조건 표현식을 평가합니다. 표현식 L <= R의 값은 L - R입니다.
x0.x = 1; x0.y = -1; val = evaluate(cons,x0)
val = 3×2
-0.7500 2.0000
2.0000 -3.0000
-4.0000 -8.0000
선형 계획법 문제 풀기
x = optimvar("x"); y = optimvar("y"); prob = optimproblem; prob.Objective = -x -y/3; prob.Constraints.cons1 = x + y <= 2; prob.Constraints.cons2 = x + y/4 <= 1; prob.Constraints.cons3 = x - y <= 2; prob.Constraints.cons4 = x/4 + y >= -1; prob.Constraints.cons5 = x + y >= 1; prob.Constraints.cons6 = -x + y <= 2; sol = solve(prob)
Solving problem using linprog. Optimal solution found.
sol = struct with fields:
x: 0.6667
y: 1.3333
해에서 목적 함수의 값을 구합니다.
val = evaluate(prob.Objective,sol)
val = -1.1111
여러 선형 제약 조건과 비선형 제약 조건을 사용하여 최적화 문제를 만듭니다.
x = optimvar("x"); y = optimvar("y"); obj = (10*(y - x^2))^2 + (1 - x)^2; cons1 = x^2 + y^2 <= 1; cons2 = x + y >= 0; cons3 = y <= sin(x); cons4 = 2*x + 3*y <= 2.5; prob = optimproblem(Objective=obj); prob.Constraints.cons1 = cons1; prob.Constraints.cons2 = cons2; prob.Constraints.cons3 = cons3; prob.Constraints.cons4 = cons4;
100개의 테스트 지점을 무작위로 만듭니다.
rng default % For reproducibility xvals = randn(1,100); yvals = randn(1,100);
점을 문제에 대한 OptimizationValues 객체로 변환합니다.
pts = optimvalues(prob,x=xvals,y=yvals);
점 pts에서 목적 함수와 제약 조건 함수의 값을 구합니다.
val = evaluate(prob,pts);
목적 함수 값은 val.Objective에 저장되며, 제약 조건 함수 값은 val.cons4를 통해 val.cons1에 저장됩니다. 목적 함수 값에 1을 더한 로그를 플로팅합니다.
figure
plot3(xvals,yvals,log(1 + val.Objective),"bo")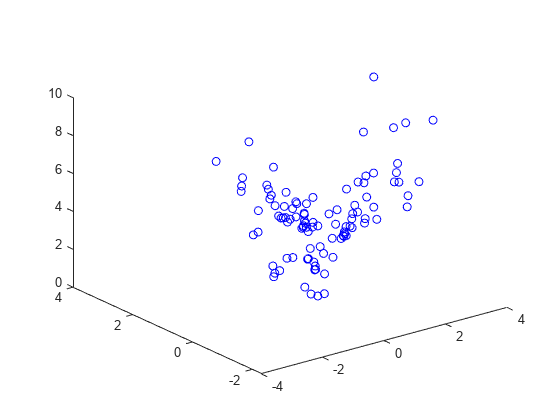
제약 조건 cons1과 cons4의 값을 플로팅합니다. 제약 조건은 양수가 아닌 값으로 계산될 때 충족된다는 사실을 기억하십시오. 양수가 아닌 값은 원으로 플로팅하고 양수 값은 x 표시로 플로팅합니다.
neg1 = val.cons1 <= 0; pos1 = val.cons1 > 0; neg4 = val.cons4 <= 0; pos4 = val.cons4 > 0; figure plot3(xvals(neg1),yvals(neg1),val.cons1(neg1),"bo") hold on plot3(xvals(pos1),yvals(pos1),val.cons1(pos1),"rx") plot3(xvals(neg4),yvals(neg4),val.cons4(neg4),"ko") plot3(xvals(pos4),yvals(pos4),val.cons4(pos4),"gx") hold off
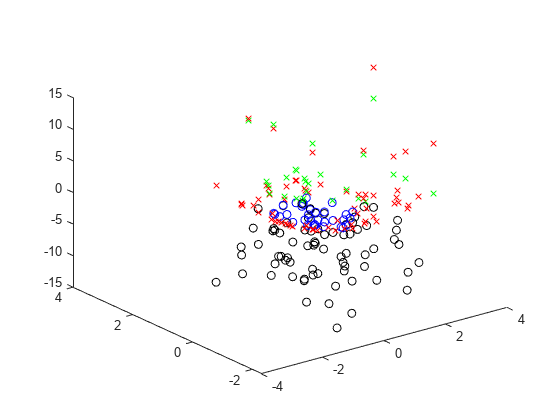
마지막 Figure에서 알 수 있듯이 evaluate를 사용하여 점의 값과 실현가능성을 모두 계산할 수 있습니다. 반대로 issatisfied는 실현가능성만 계산합니다.
두 개의 최적화 변수로 일련의 방정식을 만듭니다.
x = optimvar("x"); y = optimvar("y"); prob = eqnproblem; prob.Equations.eq1 = x^2 + y^2/4 == 2; prob.Equations.eq2 = x^2/4 + 2*y^2 == 2;
에서 시작하여 연립방정식을 풉니다.
x0.x = 1; x0.y = 1/2; sol = solve(prob,x0)
Solving problem using fsolve. Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
sol = struct with fields:
x: 1.3440
y: 0.8799
점 x0 및 sol에서 방정식의 값을 계산합니다.
vars = optimvalues(prob,x=[x0.x sol.x],y=[x0.y sol.y]); vals = evaluate(prob,vars)
vals =
1×2 OptimizationValues vector with properties:
Variables properties:
x: [1 1.3440]
y: [0.5000 0.8799]
Equation properties:
eq1: [0.9375 8.4322e-10]
eq2: [1.2500 6.7431e-09]
첫 번째 점 x0은 방정식 eq1 및 eq2 모두에 대해 0이 아닌 값을 가집니다. 두 번째 점 sol은 이 방정식들에 대입했을 때 0에 가까운 값을 가집니다. 이는 해에 대해 예상할 수 있는 결과입니다.
issatisfied를 사용하여 방정식 충족 정도를 구합니다.
[satisfied details] = issatisfied(prob,vars)
satisfied = 1×2 logical array
0 1
details =
1×2 OptimizationValues vector with properties:
Variables properties:
x: [1 1]
y: [1 1]
Equation properties:
eq1: [0 1]
eq2: [0 1]
첫 번째 점 x0은 해가 아니며 이 점에 대해 satisfied는 0입니다. 두 번째 점 sol은 해이며 이 점에 대해 satisfied는 1입니다. Equation properties를 통해 두 방정식 모두 첫 번째 점에서는 충족되지 않고 두 번째 점에서는 모두 충족됨을 확인할 수 있습니다.
입력 인수
출력 인수
세부 정보
팁
이 툴박스에는 점의 실현가능성을 계산하는 3개의 함수가 있습니다.
infeasibility— 점에서OptimizationVariable(해당 범위 및 유형 제약 조건에 대해) 또는OptimizationConstraint의 숫자형 위반 값을 계산합니다.issatisfied— 점에서OptimizationVariable또는OptimizationConstraint의 실현불가능성이나OptimizationProblem또는EquationProblem의 성분의 실현불가능성이 특정 임계값을 초과하는지 확인합니다.evaluate— 점에서OptimizationVariable,OptimizationExpression,OptimizationConstraint의 값이나OptimizationProblem또는EquationProblem의 성분의 값을 계산합니다.