센서 모델
가속도계, 자력계, 자이로스코프, 고도계, GPS, IMU, 거리 센서에 대한 센서 모델링과 시뮬레이션을 수행합니다. 센서 측정값, 센서 잡음, 환경적 조건, 기타 구성 파라미터를 분석합니다. 궤적을 생성하여 실세계를 달리는 이러한 센서를 에뮬레이션하고 센서의 성능을 보정합니다.
여러 센서를 융합하거나 다른 위치추정 알고리즘을 사용하려면 항목을 참조하십시오.
GNSS 위치추정 및 측위에 대한 자세한 내용은 GNSS 측위 항목을 참조하십시오.
함수
도움말 항목
- IMU 측정값 시뮬레이션 소개
이 예제는
imuSensorSystem object™를 사용하여 IMU(관성 측정 장치) 측정값을 시뮬레이션하는 방법을 보여줍니다. - Generate IMU Readings on a Double Pendulum
This example shows how to generate inertial measurement unit (IMU) readings from two IMU sensors mounted on the links of a double pendulum.
- Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS
- Allan 분산을 사용하여 관성 센서 잡음 분석
이 예제에서는 Allan 분산을 사용하여 MEMS 자이로스코프의 잡음 파라미터를 확인하는 방법을 보여줍니다.
- Wheel Encoder Error Sources
Explore the various error sources of wheel encoders and how they affect the wheel odometry estimate.
- 각속도 측정에서 편향 제거하기
이 예제에서는
imufilter를 사용하여 IMU로부터 자이로스코프 편향을 제거하는 방법을 보여줍니다. - Configure Time Scope MATLAB Object
Customize
timescopeproperties and use measurement tools. - Simulate Inertial Sensor Readings from a Driving Scenario
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
- INS 블록 시뮬레이션하기
이 예제에서는 좌회전 궤적을 따라가는 차량의 자세 정보를 사용하여 INS 블록을 시뮬레이션합니다.
추천 예제
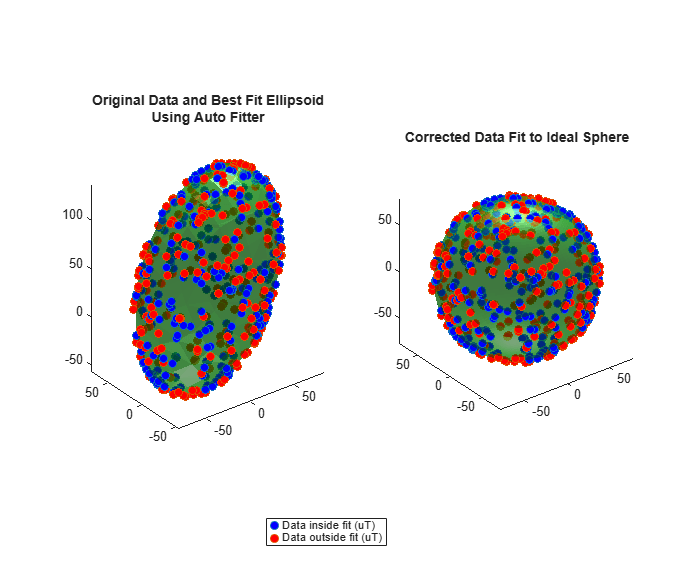
Magnetometer Calibration
Magnetometers detect magnetic field strength along a sensor's X,Y and Z axes. Accurate magnetic field measurements are essential for sensor fusion and the determination of heading and orientation.

Generate Off-Centered IMU Readings
Generate inertial measurement unit (IMU) readings from a sensor that is mounted on a ground vehicle. Depending on the location of the sensor, the IMU accelerations are different.

Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit (IMU). Gesture recognition is a subfield of the general Human Activity Recognition (HAR) field. In this example, you use quaternion dynamic time warping and clustering to build a template matching algorithm to classify five gestures.

Simulink를 사용한 IMU 센서 융합
이 예제에서는 Simulink®를 사용하여 IMU 센서 데이터를 생성하고 융합하는 방법을 보여줍니다. 가속도계, 자이로스코프, 자력계의 동작을 정확하게 모델링하고 그 출력값을 융합하여 방향을 계산할 수 있습니다.