accelcal
설명
예제
입력 인수
출력 인수
세부 정보
가속도계 보정을 위한 측정 데이터를 구하려면 가속도계 측정 프레임(X-Y-Z)의 방향을 이 다이어그램에 표시된 6개 방향 중 하나와 맞춥니다. 예를 들어 x-up 측정값을 구하려면 첫 번째 그림처럼 가속도계 측정 프레임의 양의 X 방향을 중력의 반대 방향으로 정렬합니다.
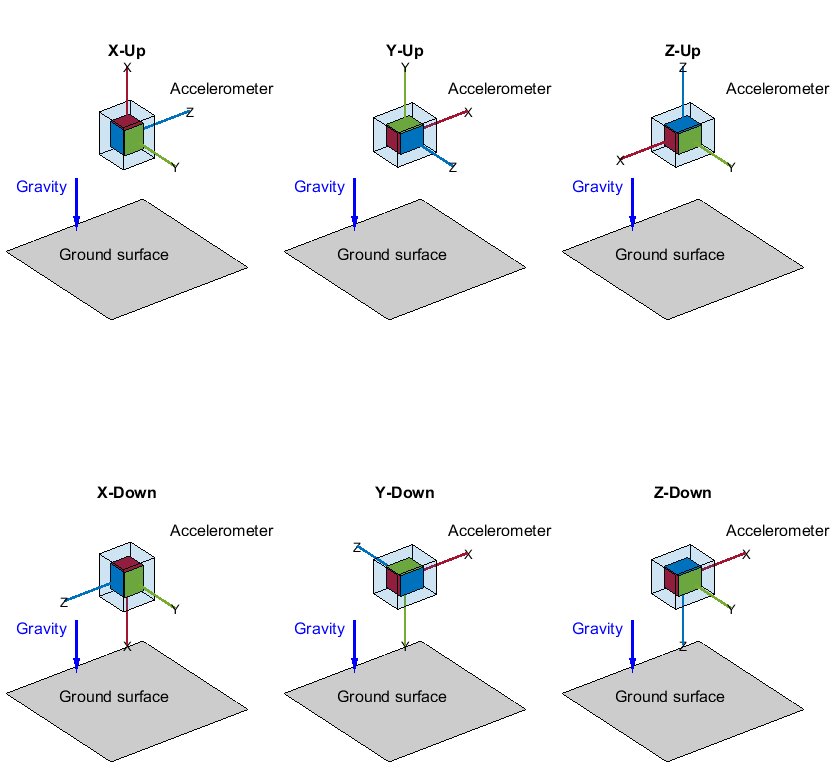
가속도계에 보정 오류가 없고 그림과 같이 측정 프레임이 완벽하게 정렬되면 다음 표에 나와 있는 이상적인 측정값을 구할 수 있습니다.
| 방향 | aX | aY | aZ |
|---|---|---|---|
| X-Up | -g | 0 | 0 |
| X-Down | +g | 0 | 0 |
| Y-Up | 0 | -g | 0 |
| Y-Down | 0 | +g | 0 |
| Z-Up | 0 | 0 | -g |
| Z-Down | 0 | 0 | +g |
표에서 aX, aY, aZ는 각각 X 가속 성분, Y 가속 성분, Z 가속 성분입니다. g는 로컬 지구 중력 상수입니다.
참고 문헌
[1] AN4508 Application Note: Parameters and Calibration of a Low-G 3-Axis Accelerometer.
버전 내역
R2023b에 개발됨