GPS
라이브러리:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
설명
이 블록은 로컬 좌표 프레임 또는 측지 프레임의 입력 위치와 속도를 기반으로, 잡음으로 인해 손상된 GPS 측정값을 출력합니다. 또한 WGS84 지구 모델을 사용하여 로컬 좌표를 LLA(위도-경도-고도) 좌표로 변환합니다.
예제
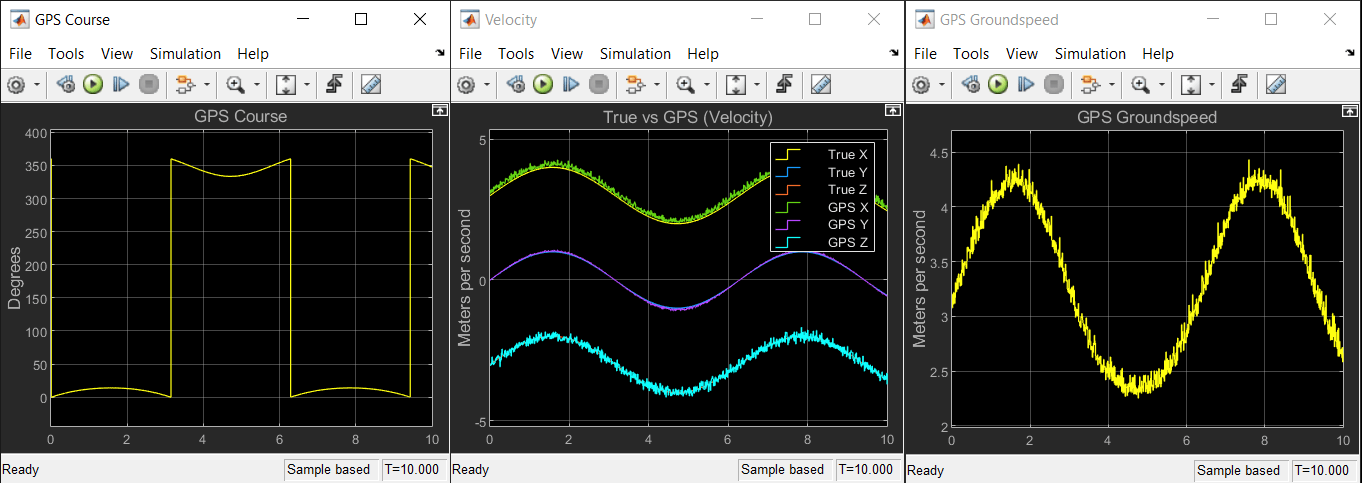
Simulate GPS Sensor Noise
Use the GPS block to add GPS sensor noise to position and velocity inputs in Simulink®.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2021b에 개발됨