tilt
설명
T = tilt(orientations)orientations를 기반으로 기울기 각도를 반환합니다. 자세한 내용은 기울기(tilt) 각도 정의 항목을 참조하십시오.
예제
입력 인수
출력 인수
세부 정보
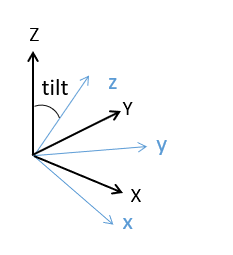
기울기 각도는 기준 프레임의 양의 Z 방향과 바디 프레임의 양의 Z 방향 사이의 각도로 정의됩니다. orientations 입력값은 기준 프레임에서 바디 프레임으로의 회전 좌표 변환을 정의합니다.
확장 기능
버전 내역
R2023b에 개발됨