referencePathFrenet
웨이포인트에 피팅된 평활한 기준 경로
설명
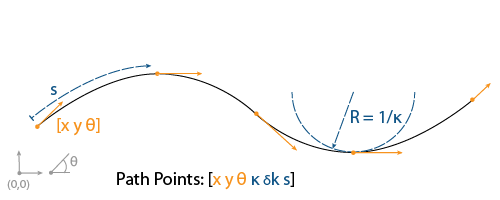
referencePathFrenet 객체는 [x y] 또는 [x y theta]로 주어진 일련의 웨이포인트에 대해 평활하고 연속적인 조각별 곡선을 피팅합니다. 피팅 후 곡선을 따르는 점, 즉 경로 점은 [x y theta kappa dkappa s]로 표현됩니다. 각 요소는 다음과 같습니다.
x y, theta — 전역 좌표로 표현된 SE(2) 상태(x와 y의 단위는 미터이고 theta의 단위는 라디안임)
kappa — 곡률, 또는 반경의 역수(단위:
m-1)dkappa — 호 길이에 대한 곡률의 도함수(단위:
m-2)s — 호 길이, 또는 경로상에서 경로 원점으로부터의 거리(단위: 미터)
이 객체를 사용하여 전역 좌표계와 Frenet 좌표계 간에 궤적을 변환하고, 호 길이를 기준으로 경로를 따르는 상태를 보간하고, 전역 상태에서 가장 가까운 경로상의 점을 쿼리합니다.
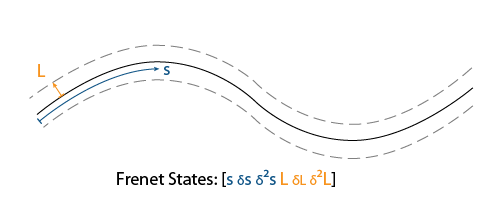
이 객체는 Frenet 상태를 [S dS ddS L dL ddL] 형식의 벡터로 표현합니다. 여기서 S는 호 길이이고 L은 기준 경로 방향으로부터의 직교 편차입니다. S의 도함수는 시간에 대해 상대적입니다. L의 도함수는 호 길이 S에 대해 상대적입니다.
생성
설명
refPathObj = referencePathFrenet(는 지정된 웨이포인트에 대해 일련의 연속적인 조각별 곡선을 피팅합니다. waypoints)waypoints 인수는 Waypoints 속성을 설정합니다.
refPathObj = referencePathFrenet(___,는 위에 열거된 구문의 입력 인수 외에 하나 이상의 이름-값 입력 쌍 인수를 사용하여 속성을 설정합니다. DiscretizationDistance 속성과 MaxNumWaypoints 속성을 이름-값 인수로 지정할 수 있습니다.Name,Value)
속성
객체 함수
closestPoint | Find closest point on reference path to global point |
closestPointsToSequence | Projects sequence of points onto path |
closestProjections | Find orthogonal projections between path tangent vector and query point |
curvature | 호 길이에서 곡률 반환 |
changeInCurvature | 호 길이에서 곡률 변화 반환 |
frenet2global | Convert Frenet states to global states |
global2frenet | Convert global states to Frenet states |
interpolate | Interpolate reference path at provided arc lengths |
position | 호 길이에서 xy 위치 반환 |
tangentAngle | 호 길이에서 탄젠트 각도 반환 |
show | Display reference path in figure |
copy | Copy reference path |
예제
Frenet 좌표를 사용하여 기준 경로를 바탕으로 대안 궤적을 생성합니다. 궤적에 대해 서로 다른 초기 상태와 최종 상태를 지정하십시오. 생성된 궤적을 기반으로 상태를 조정합니다.
일련의 웨이포인트에서 기준 경로를 생성합니다. 기준 경로로부터 trajectoryGeneratorFrenet 객체를 만듭니다.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
경로 원점과 경로 아래쪽 30미터 지점 사이에 5초 궤적을 Frenet 상태로 생성합니다.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
궤적을 전역 좌표에 표시합니다.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])

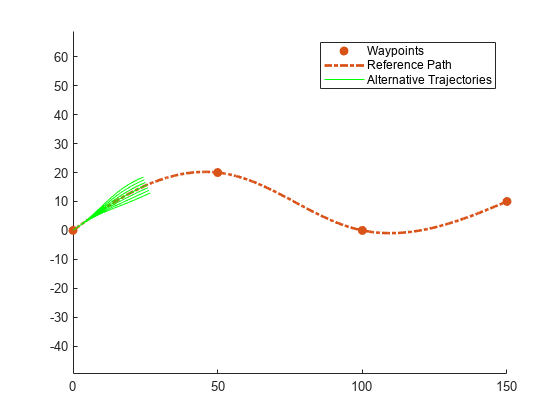
–3m와 3m 사이의 횡방향 편차로 최종 상태의 행렬을 만듭니다. 동일한 호 길이를 포함하되, 기준 경로에서 좌우로 벗어나는 궤적을 10초 내에 생성하십시오. 새로운 대안 경로를 표시합니다.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
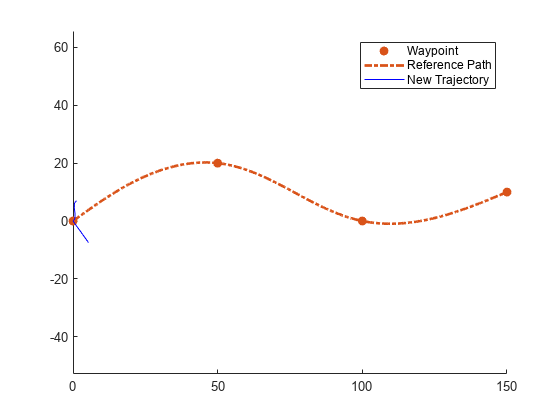
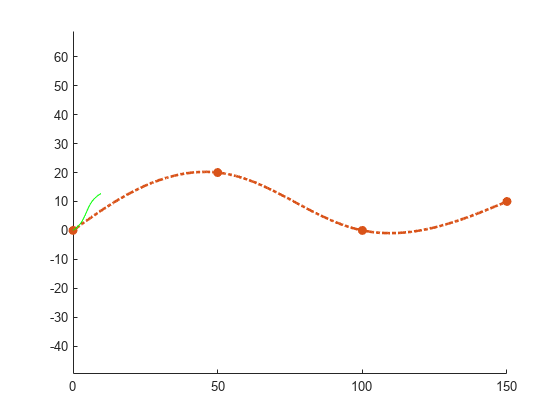
새로운 최종 상태를 지정하여 새로운 궤적을 생성합니다. 이 궤적은 10m/s의 종방향 속도를 얻기 위해 역방향 모션이 필요하므로 바람직하지 않습니다.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
NaN 호 길이를 지정하여 종방향 상태의 제한 사항을 완화합니다. 궤적을 다시 생성하고 표시하십시오. 새로운 위치는 기준 경로에서 벗어나지 않는 양호한 대안 궤적을 보여줍니다.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
세부 정보
참고 문헌
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
[2] Bertolazzi, Enrico, and Marco Frego. “Fast and Accurate Clothoid Fitting.” Mathematical Methods in the Applied Sciences 38, no. 5 (March 30, 2015): 881–97. https://doi.org/10.1002/mma.3114.
확장 기능
버전 내역
R2020b에 개발됨