선형 모델 식별
선형 모델이 시스템 동특성을 완전히 나타내기에 충분한 경우 선형 모델 식별을 사용합니다. System Identification 앱 또는 명령줄에서 선형 모델을 식별할 수 있습니다. System Identification Toolbox™를 사용하면 네 가지 일반적인 유형의 선형 모델을 만들고 추정할 수 있습니다.
모수적 모델 — 전달 함수 모델, 선형 상태공간 모델, 다항식 모델, 공정 모델과 같은 구조에서 모수를 추정합니다.
주파수 응답 모델 — 스펙트럼 분석을 사용하여 스펙트럼 모델을 추정합니다.
상관 모델 — 상관 분석을 사용하여 임펄스 응답 모델의 비모수적 추정을 수행합니다.
선형 그레이박스 모델 — 사전 지식으로부터 얻은 시스템 정보나 물리적 원칙에서 유추할 수 있는 시스템 정보를 통합하여 임의의 상미분 방정식 또는 차분 방정식의 계수를 추정합니다.
선형 모델 식별에는 주파수 영역 데이터 또는 균일하게 샘플링된 시간 영역 데이터가 필요합니다. 데이터는 하나 이상의 입력 및 출력 채널을 가질 수 있습니다. 자세한 내용은 About Identified Linear Models 항목을 참조하십시오. 모수적 모델 구조(예: AR, ARMA)를 사용하여 출력 채널이 하나이고 입력 채널은 없는 시계열 데이터를 모델링할 수도 있습니다.
식별된 모델을 사용하여 명령줄, 앱 또는 Simulink®에서 모델 출력을 시뮬레이션하고 예측할 수 있습니다.
카테고리
- 선형 모델 식별 기본 사항
선형 모델 식별, 적합한 모델 구조 선택, 모델 객체 구조 생성과 수정, 정규화된 추정 사용을 위한 필수 정보
- 공정 모델
정적 이득, 시정수 및 입력/출력 지연을 갖는 낮은 차수의 전달 함수 모델
- 입력-출력 다항식 모델
ARX, ARMAX, 출력-오차, Box-Jenkins 모델 구조를 비롯한 입력-출력 다항식 모델
- 상태공간 모델
자유 파라미터화, 표준 파라미터화 및 구조화된 파라미터화가 적용된 상태공간 모델, 상응하는 ARMAX 및 출력 오차(OE) 모델
- 전달 함수 모델
전달 함수 모델
- 선형 그레이박스 모델
선형 미분 방정식, 차분 방정식 및 상태공간 방정식의 계수 추정
- 주파수 응답 모델
스펙트럼 분석을 사용하여 획득한 주파수 응답 모델
- 상관 모델
상관 분석을 사용하여 획득한 임펄스 응답 모델
추천 예제

Glass Tube Manufacturing Process
Linear model identification of a glass tube manufacturing process.

열 교환기에 대한 전달 함수 모델 추정하기
이 예제에서는 측정된 신호 데이터에서 전달 함수를 추정하는 방법을 보여줍니다.
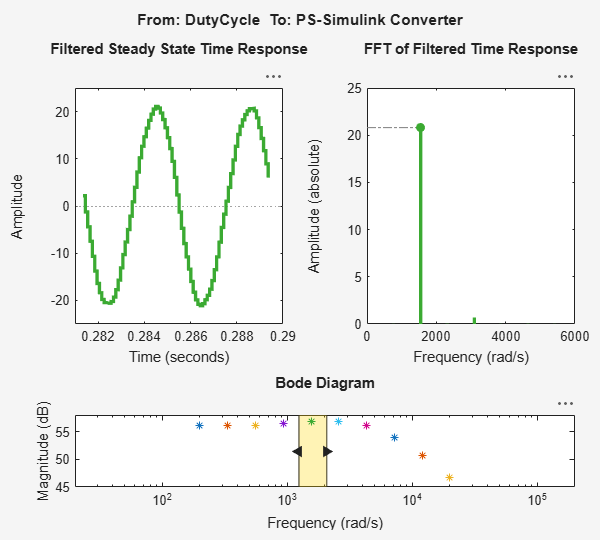
부스트 컨버터에 대한 전달 함수 모델 추정하기
이 예제에서는 주파수 응답 데이터에서 전달 함수를 추정하는 방법을 보여줍니다.
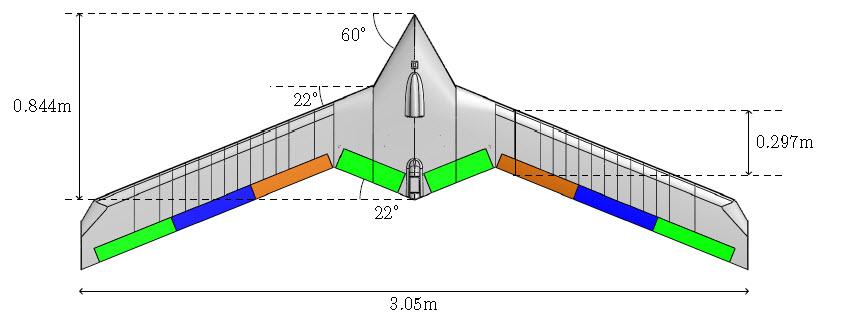
Modal Analysis of a Flexible Flying Wing Aircraft
Computation of bending modes of a flexible wing aircraft.
Comparison of Various Model Identification Methods
Several identification methods available in System Identification Toolbox.

Estimating Continuous-Time Models Using Simulink Data
Illustrates how models simulated in Simulink® can be identified using System Identification Toolbox™. The example describes how to deal with continuous-time systems and delays, as well as the importance of the intersample behavior of the input.

Linear Approximation of Complex Systems by Identification
Obtain linear approximations of a complex, nonlinear system by means of linear model identification.

Analyze Data in Multivariable Systems and Identify Models
Collect MIMO data, estimate and compare models, and view corresponding model responses.

Use LSTM Network for Linear System Identification
Use Long Short-Term Memory (LSTM) neural networks to estimate a linear system and compares this approach to transfer-function estimation.