카메라 센서 구성
단안 카메라 센서의 시각적 인식 알고리즘을 개발할 때는 정확한 카메라 구성이 필수적입니다. monoCamera 객체를 사용하여 이러한 센서의 내부 파라미터와 외부 파라미터를 정의해 센서를 구성할 수 있습니다. 내부 파라미터를 구하려면 카메라 보정기 앱을 사용합니다. 외부 파라미터를 구하려면 estimateMonoCameraParameters 함수를 사용합니다. 구성된 monoCamera 객체를 사용하여 이미지 좌표의 위치를 차량 좌표의 위치로 변환할 수 있습니다. 이러한 변환을 통해 에고 차량의 전방에 있는 위치까지 거리를 추정할 수 있습니다. monoCamera 객체를 사용하여 조감도 이미지를 생성할 수도 있으며, 이 이미지를 사용하여 카메라 구성을 확인하거나 차선 검출 알고리즘의 일부로 사용할 수 있습니다.
앱
| 카메라 보정기 | 단일 카메라의 기하 파라미터 추정 |
| 스테레오 카메라 보정기 | 스테레오 카메라의 기하 파라미터 추정 |
함수
도움말 항목
- Calibrate a Monocular Camera
Estimate the intrinsic and extrinsic parameters of a monocular camera using a checkerboard pattern.
추천 예제

Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model and construct a corresponding monocular camera sensor simulation.

Annotate Video Using Detections in Vehicle Coordinates
Configure and use a monocular camera object to display information provided in vehicle coordinates on a video display.
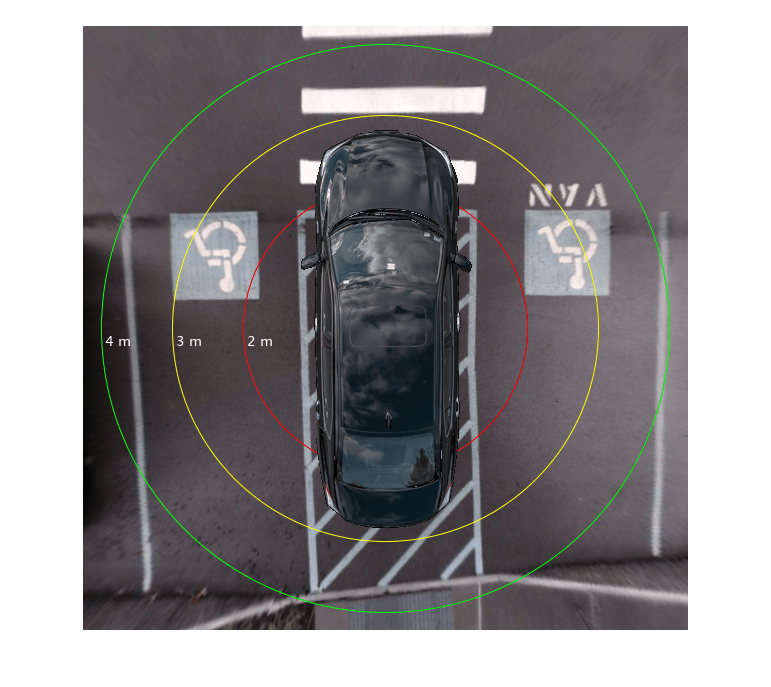
Create 360° Bird's-Eye-View Image Around a Vehicle
Create a 360° bird's-eye-view image around a vehicle for use in a surround view monitoring system. It then shows how to generate code for the same bird's-eye-view image creation algorithm and verify the results.