객체 및 차선 검출
머신러닝 기법과 딥러닝 기법을 사용하여 비전 데이터에서 객체를 검출할 수 있습니다. RANSAC(random sample consensus) 알고리즘을 사용하여 포물선 차선 경계나 3차 차선 경계를 분할, 검출, 모델링할 수도 있습니다. 객체를 검출한 후에는 Automated Driving Toolbox™ 함수를 사용하여 검출을 평가하고 시각화합니다.
딥러닝 접근법을 사용하여 라이다 포인트 클라우드에서 도로 차선을 검출할 수도 있습니다. Automated Driving Toolbox는 K-Lane 데이터 세트에 대해 훈련된 라이다 차선 검출 신경망을 제공합니다. 사전 훈련된 신경망을 사용하면 최대 6개의 차선을 검출할 수 있습니다. 분류 정확도, 정밀도, 재현율, F1 점수 등 다양한 메트릭을 사용하여 검출기의 성능을 평가할 수도 있습니다.
라이다 포인트 클라우드의 차선을 검출하려면 애드온 탐색기에서 Automated Driving Toolbox Model for Lidar Lane Detection 지원 패키지를 다운로드합니다. 애드온 다운로드에 대한 자세한 내용은 애드온을 받고 관리하기 항목을 참조하십시오.
라이다 포인트 클라우드 데이터를 처리하고 Velodyne 패킷 캡처(PCAP) 파일에서 포인트 클라우드를 가져오는 방법에 대한 자세한 내용은 포인트 클라우드 처리 항목을 참조하십시오.
함수
도움말 항목
- Get Started with Lidar Lane Detection Using Deep Learning
Use lidar lane detection network to detect road lanes.
- Detect, Classify, and Track Vehicles Using Lidar (Lidar Toolbox)
Detect, classify, and track vehicles by using lidar point cloud data captured by a lidar sensor mounted on an ego vehicle.
추천 예제

Ground Plane and Obstacle Detection Using Lidar
Detect the ground plane and find nearby obstacles in 3-D lidar data.
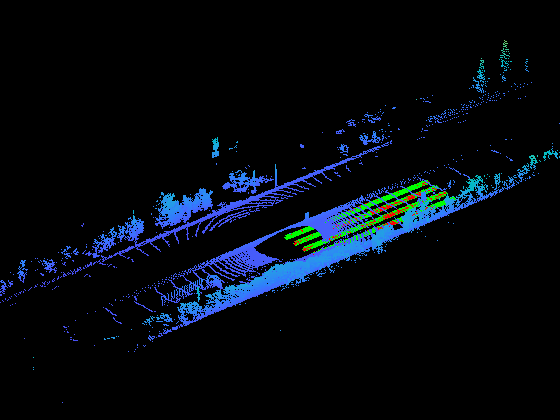
Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.

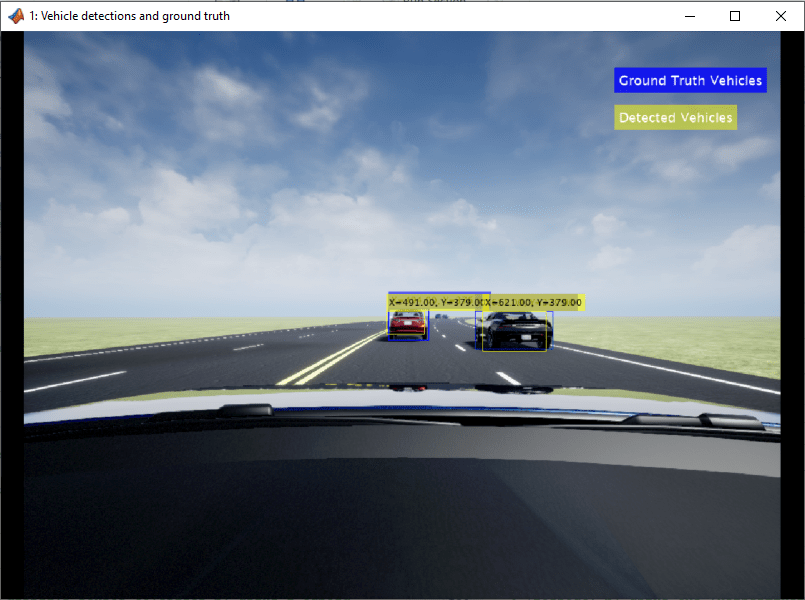
Visual Perception Using Monocular Camera
Construct a monocular camera sensor simulation capable of lane boundary and vehicle detections.

Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation.

Automate Testing for Lane Marker Detector
Automate the testing of a lane marker detector algorithm and generated code.

Train a Deep Learning Vehicle Detector
Train a vision-based vehicle detector using deep learning.
Generate Code for Vision Vehicle Detector
Generate deployable code for a monocular-camera-based vehicle detector and validate the functional equivalence with simulation.

Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.

Track Multiple Vehicles Using a Camera
Detect and track multiple vehicles with a monocular camera mounted in a vehicle.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.

Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.