Controlling Robot Motion | Student Competition: Mobile Robotics Training, Part 1
From the series: Student Competition: Mobile Robotics Training
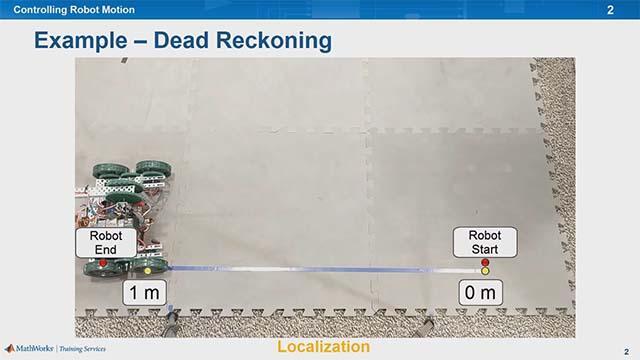
Learn how to control a robot to move on its wheels autonomously using a simple dead reckoning algorithm.
You will start with an introduction to encoder sensors and then learn how to use the distance calculation using encoders to implement the dead reckoning algorithm in Simulink®.
In this video, you will also be introduced to the Mobile Robotics Training library to include simulation behavior and test your algorithm.
Mobile Robotics Training toolbox will be used for the simulation purposes.
A VEX EDR robot is used to demonstrate the performance of the dead reckoning algorithms on the microcontroller.
Additional Resources:
Recorded: 27 Jun 2017
Download Code and Files
Related Products
Learn More











웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다: United States
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)