움직임 기반 구조
움직임 기반 구조(SfM)는 서로 다른 시점에서 촬영된 2차원 영상 세트로부터 장면의 3차원 구조를 추정하는 과정입니다. Computer Vision Toolbox™는 특징 검출, 매칭, 카메라 자세 추정, 삼각측량, 번들 조정을 포함한 전체 SfM 파이프라인을 제공합니다. 이러한 기능은 3차원 매핑, 사진측량(photogrammetry), 자율 내비게이션과 같은 응용 분야에 필수적입니다.
증분 움직임 기반 구조 파이프라인에 대한 단계별 종합 안내는 Structure from Motion from Multiple Views 예제 시리즈를 참조하십시오. 이 예제 시리즈에서는 bag-of-features 접근 방식을 사용하여 카메라 뷰로부터 뷰 그래프를 만들고, 기하 제약 조건을 사용하여 뷰 그래프를 미세 조정하고, 강인한 초기 뷰 쌍을 선택하여 3차원 복원을 초기화한 다음, 나머지 카메라 뷰를 통합하여 완전한 3차원 장면을 복원하는 방법을 보여줍니다. 장면의 희소 3차원 포인트 클라우드를 사용하고 조밀한 3차원 메시를 생성하는 방법에 대한 내용은 Dense 3-D Reconstruction of Asteroid Surface from Image Sequence 예제를 참조하십시오.
조밀한 복원과 새로운 뷰 합성을 위해, 이 툴박스는 NeRF(Neural Radiance Fields: 신경 방사 필드)를 지원합니다. trainNerfacto 함수를 사용하여 보유한 영상 모음으로 NeRF 모델을 훈련시키고 새로운 뷰를 생성하십시오. 그런 다음 포인트 클라우드를 사용하여 pc2surfacemesh (Lidar Toolbox) 함수로 3차원 메시를 생성할 수 있습니다.
함수
도움말 항목
증분 움직임 기반 구조
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (R2026a 이후)
기본 사항
- 움직임 기반 구조란?
2차원 영상 시퀀스에서 3차원 구조를 추정합니다. - Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems. - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction.
추천 예제

Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
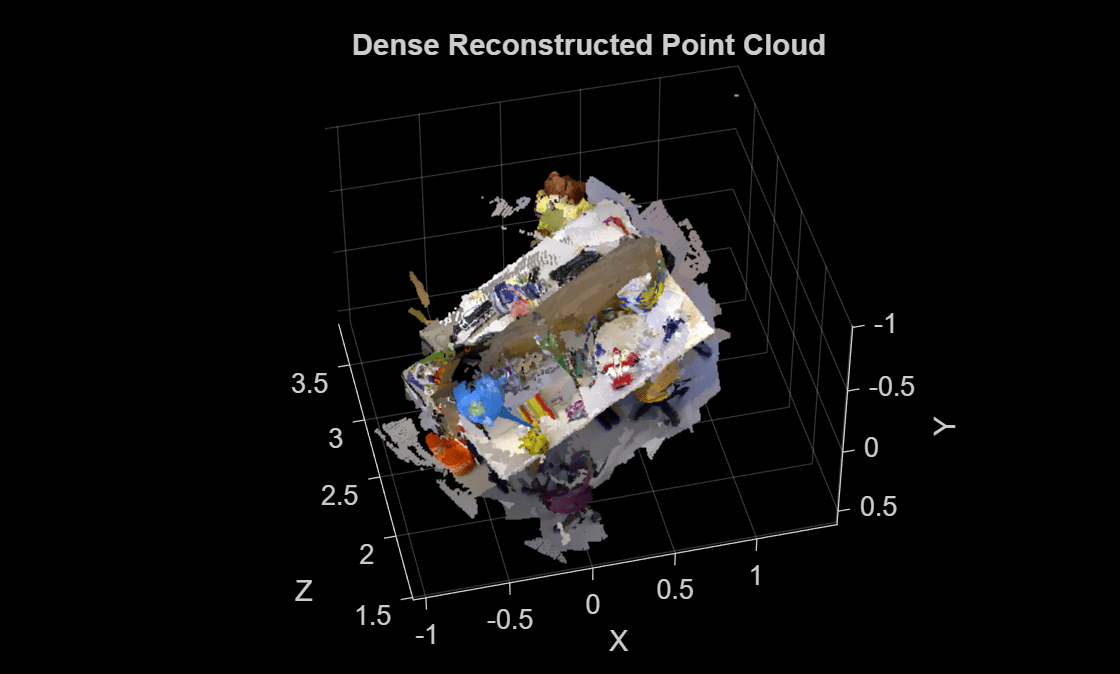
Dense 3-D Reconstruction from Multiple Views Using RAFT Optical Flow
Reconstruct dense 3-D scene by augmenting sparse Structure-from-Motion (SfM) point cloud with dense pixel correspondences estimated using RAFT optical flow.
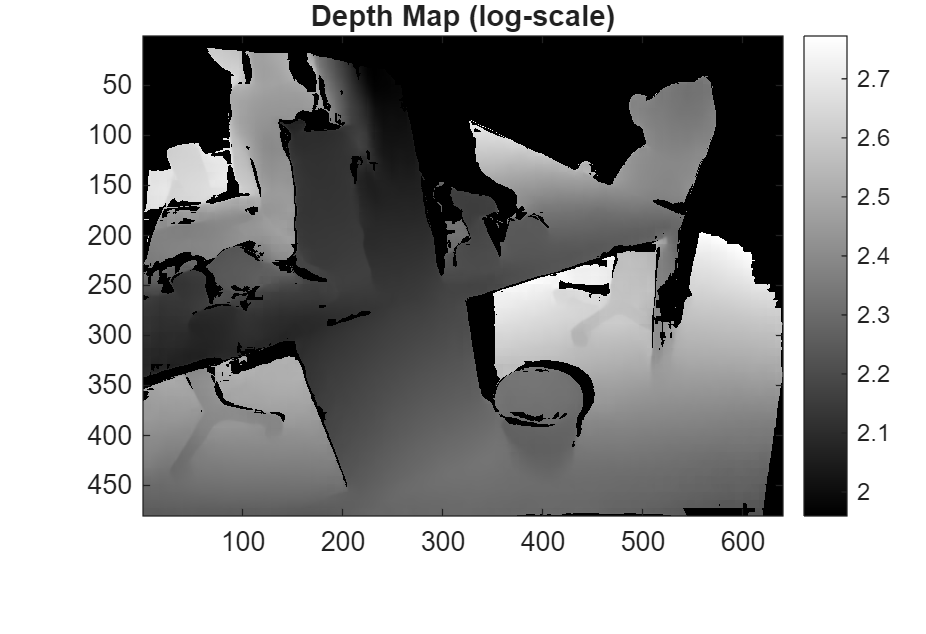
Dense 3-D Reconstruction from Two Views Using RAFT Optical Flow
Perform dense 3-D scene reconstruction from two monocular images showing different viewpoints using RAFT optical flow model.
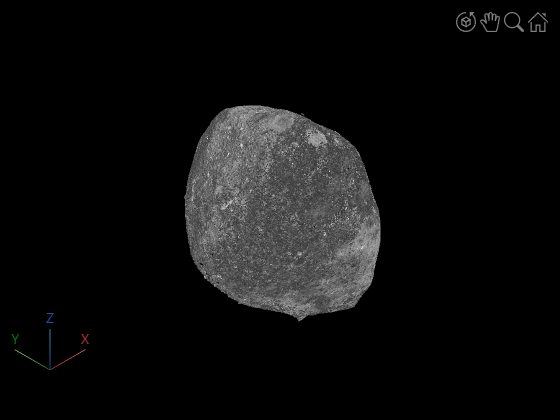
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.
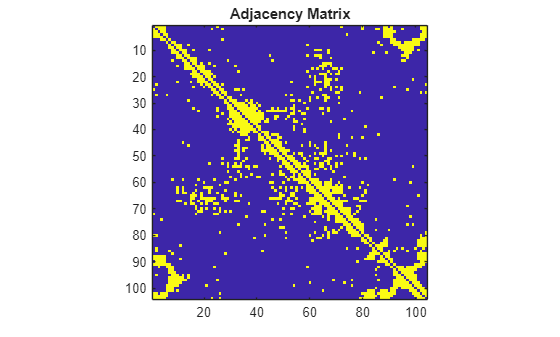
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
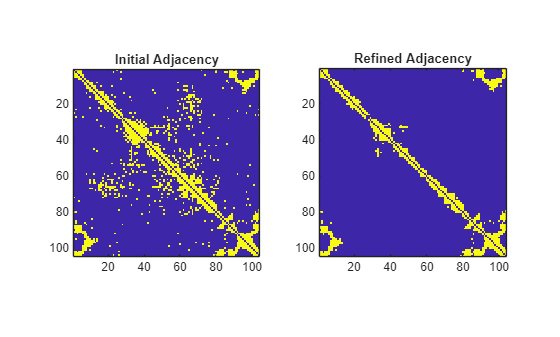
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.
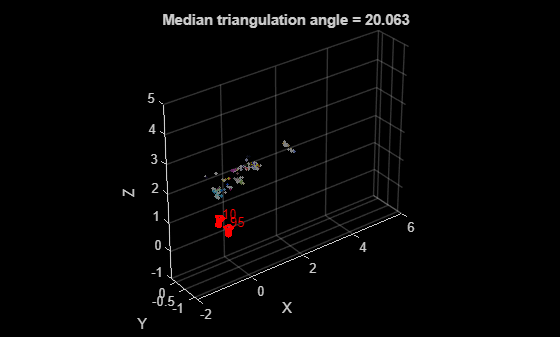
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.
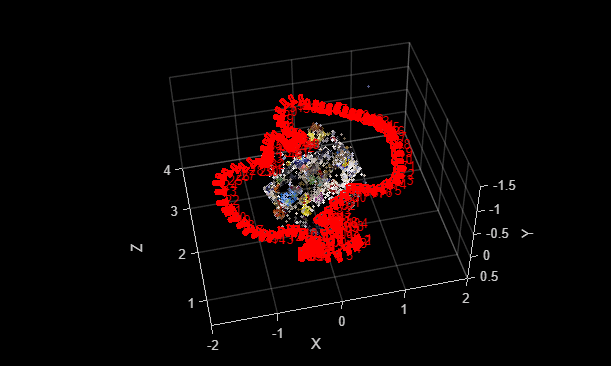
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.

두 시점에서의 움직임 기반 구조
2차원 영상 세트로부터 장면의 3차원 구조를 추정합니다.
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.