스테레오 비전
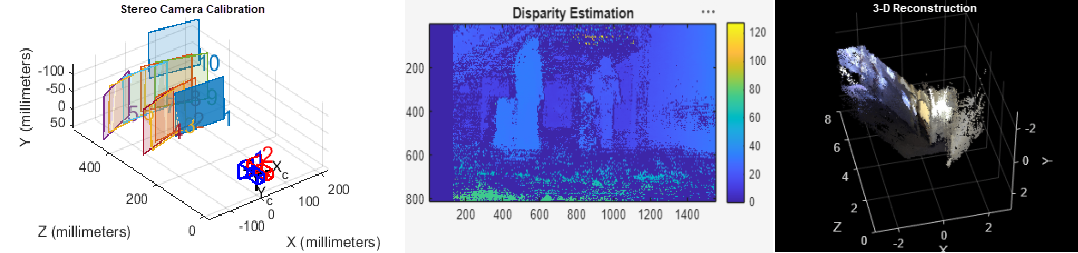
스테레오 비전을 사용하면 동일한 장면에 대한 두 개의 뷰를 비교하여 깊이를 추정할 수 있습니다. 이 계산의 출력은 3차원 포인트 클라우드이며, 여기서 각 점은 두 영상 중 하나에서 매칭되는 픽셀에 대응합니다. 워크플로는 스테레오 카메라 보정으로 시작하며, 이 단계에서는 스테레오 카메라 보정기 앱을 사용하여 내부 파라미터와 외부 파라미터를 추정합니다. 보정이 완료되면 스테레오 영상 편위수정을 통해 영상 쌍을 공통의 평면에 정렬하여 시차 추정을 위한 대응점 매칭을 단순화합니다. 이에 대한 소개는 Using the Stereo Camera Calibrator App 항목을 참조하십시오. 무보정 영상에 대해 스테레오 편위수정을 수행하려면 Uncalibrated Stereo Image Rectification 항목을 참조하십시오.
블록 매칭이나 준전역 매칭(semi-global matching)과 같은 고전적인 알고리즘을 사용하여 시차 지도를 계산할 수 있습니다. 그런 다음, 삼각측량 및 에피폴라 지오메트리와 같은 기하 원리를 적용하여, 시차 지도를 이용한 조밀한 3차원 장면 복원을 수행할 수 있습니다. 자세한 내용은 Reconstruct 3-D Scene from Stereo Image Pair Using Semi-Global Matching 항목과 Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction 항목을 참조하십시오.
스테레오 비전을 사용하면 시각 SLAM 및 실제 거리 측정과 같은 고급 응용도 가능합니다. 자세한 내용은 Stereo Visual SLAM for UAV Navigation in 3D Simulation 항목과 Measure Real-World Distances to Objects Using a Stereo-Camera 항목을 참조하십시오.
앱
| 스테레오 카메라 보정기 | 스테레오 카메라의 기하 파라미터 추정 |
함수
도움말 항목
- What Is Stereo Reconstruction?
Reconstruct 3-D scene using stereo vision.
- 카메라 보정이란?
영상 또는 비디오 카메라의 렌즈 및 영상 센서에 대한 파라미터를 추정합니다.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
추천 예제

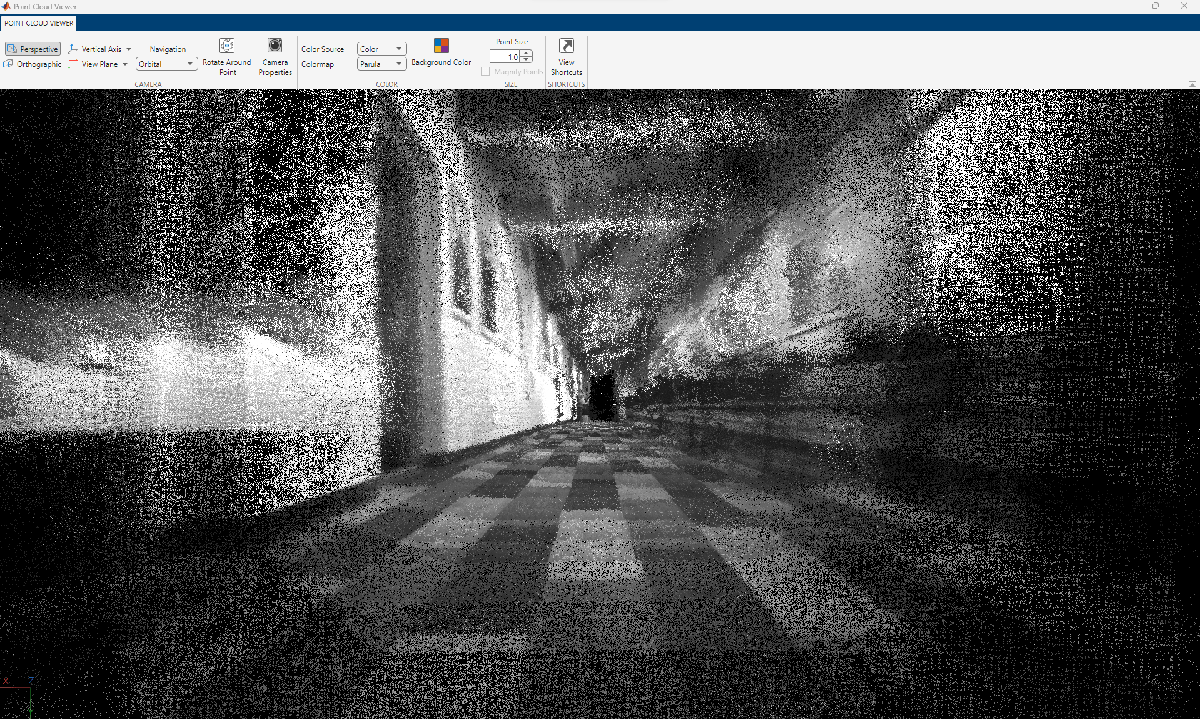
Reconstruct 3-D Scene from Stereo Image Pair Using Semi-Global Matching
Reconstruct the 3-D world coordinates of points corresponding to each pixel from a disparity map.
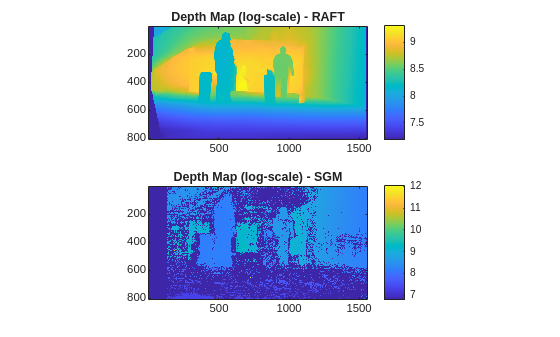
Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction
Compare deep learning based RAFT optical flow model and classical semi-global matching algorithm for disparity estimation and stereo reconstruction applications.

Measure Real-World Distances to Objects Using a Stereo-Camera
Detect a face and compute the distance between it in a camera scene and the camera.

Uncalibrated Stereo Image Rectification
Compute rectification of two uncalibrated images.
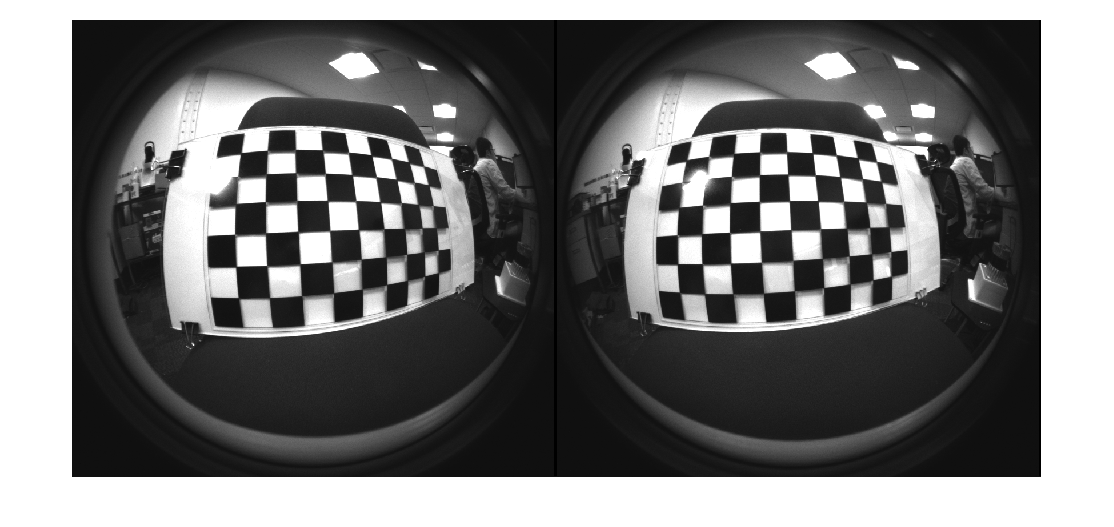
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Develop a visual SLAM algorithm for a UAV equipped with a stereo camera.

Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.

스테레오 비디오에서 깊이 추정
보정된 스테레오 카메라로 촬영한 비디오에서 사람을 검출하고 카메라와의 거리를 확인합니다.

Code Generation for Depth Estimation from Stereo Video
Use the MATLAB® Coder™ to generate C code for a MATLAB function, which uses the stereoParameters object produced by Stereo Camera Calibrator app or the estimateCameraParameters function. The example explains how to modify the MATLAB code in the 스테레오 비디오에서 깊이 추정 example to support code generation.