이 페이지의 내용은 이전 릴리스에 관한 것입니다. 해당 영문 페이지는 최신 릴리스에서 제거되었습니다.
Simulink를 사용한 컴퓨터 비전
Computer Vision Toolbox™ 블록을 사용하여 컴퓨터 비전 응용을 위한 모델을 구축합니다. 특징 검출, 영상 분석, FIR 필터링, 주파수 및 허프 변환, 모폴로지, 대비 향상 및 잡음 제거를 수행합니다.
국소 특징과 그 설명자는 많은 컴퓨터 비전 알고리즘에서 기본적인 구성요소입니다. 응용 분야로는 영상 정합, 객체 검출 및 분류, 추적, 움직임 추정 등이 있습니다.
움직임 추정과 추적은 활동 인식, 교통 모니터링, 자동차 안전, 감시 등의 응용 분야에서 핵심 작업입니다.
분석 및 향상 기법을 통해 신호 대 잡음비를 높이고 특징을 강조할 수 있습니다.
showvipblockdatatypetable 함수는 블록 기능, 코드 생성과 관련한 제한 사항, 가변 크기 조정 및 모든 Computer Vision Toolbox 블록에 지원되는 데이터형과 관련한 세부 정보를 제공합니다.
블록
객체
Simulink.ImageType | Specify image data type (R2021b 이후) |
도움말 항목
- Video Formats
Video data is a series of images over time.
- Image Formats
In the Computer Vision Toolbox software, images are real-valued ordered sets of color or intensity data.
- Fixed-Point Signal Processing
Discusses advantages of fixed-point development in general and of fixed-point support in System Toolbox software in particular, as well as lists common applications of fixed-point signal processing development.
- Fixed-Point Concepts and Terminology
Defines fixed-point concepts and terminology that are helpful to know as you use DSP System Toolbox™ software.
- Arithmetic Operations
Describes the arithmetic operations used by fixed-point DSP System Toolbox blocks, including operations and casts that might invoke rounding and overflow handling methods.
- Fixed-Point Support for MATLAB System Objects
Enable fixed-point support for Computer Vision Toolbox system objects.
- Specify Fixed-Point Attributes for Blocks (DSP System Toolbox)
Teaches you how to specify fixed-point attributes and parameters in software on both the block and system levels.
- Visualize Point Cloud Sequence
This example shows how to visualize a streaming point cloud sequence by using a Point Cloud Viewer block.
추천 예제

Track Marker Using Simulink Images
Track a marker on a whiteboard by using images of the Simulink.ImageType data type.
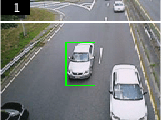
광학 흐름을 사용한 자동차 추적
이 예제에서는 광학 흐름 추정을 사용하여 비디오 시퀀스에서 자동차를 검출하고 추적하는 방법을 보여줍니다.

Pattern Matching
Use the 2-D normalized cross-correlation for pattern matching and target tracking.

Object Counting
Use basic morphological operators to extract information from a video stream. In this case, the model counts the number of staples in each video frame. Note that the focus and lighting change in each video frame.

Video Stabilization
Remove the effect of camera motion from a video stream.

Barcode Recognition Using Live Video Acquisition
Use the From Video Device block provided by Image Acquisition Toolbox™ to acquire live image data from a Point Grey Flea® 2 camera into Simulink®. The example uses the Computer Vision Toolbox™ to create an image processing system which can recognize and interpret a GTIN-13 barcode. The GTIN-13 barcode, formally known as EAN-13, is an international barcode standard. It is a superset of the widely used UPC standard.
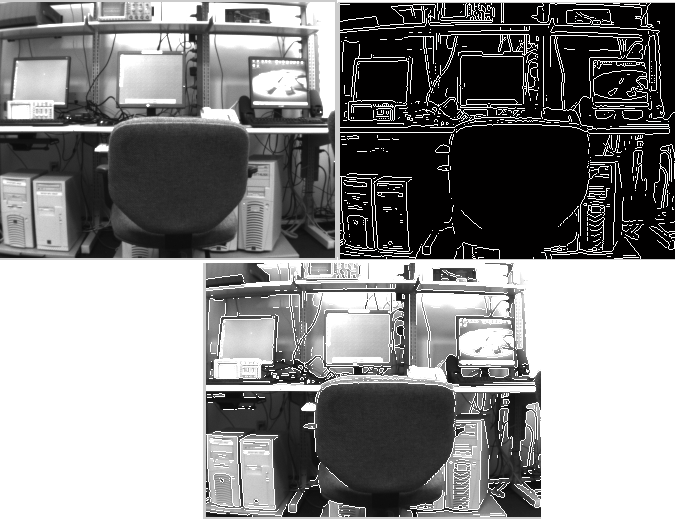
Edge Detection Using Live Video Acquisition
Use the From Video Device block provided by Image Acquisition Toolbox™ to acquire live image data from a Hamamatsu C8484 camera into Simulink®. The Prewitt method is applied to find the edges of objects in the input video stream.