카메라 자세 추정과 3차원 복원
Computer Vision Toolbox™는 여러 뷰로부터 카메라 자세를 추정하고 3차원 장면을 복원하기 위한 포괄적인 기본 툴 세트를 제공합니다. 이러한 툴은 움직임 기반 구조(structure-from-motion), 시각 SLAM, 증강현실, 로보틱스와 같은 응용 분야에 필수적입니다. Essential 행렬이나 Fundamental 행렬을 사용하여 카메라 자세를 추정할 수 있으며, 에피폴라 지오메트리를 기반으로 상대적인 카메라 위치를 계산할 수도 있습니다. 보정된 카메라의 경우, P3P(perspective-three-point) 알고리즘이나 카메라 투영 행렬을 사용하여 2차원-3차원 대응점으로부터 절대 자세나 상대 자세를 구할 수 있습니다. 자세한 내용은 estimateEssentialMatrix 항목, estimateFundamentalMatrix 항목, estrelpose 항목을 참조하십시오.
자세 추정을 미세 조정하고 복원 정확도를 높이기 위해, 이 툴박스는 카메라 자세와 3차원 점 위치를 함께 또는 개별적으로 최적화하는 번들 조정 기법을 지원합니다. 자세한 내용은 bundleAdjustment 항목을 참조하십시오.
3차원 복원을 위해, 여러 뷰로부터 점들을 삼각측량하고 대응점 트랙을 관리할 수 있습니다. 또한 영상 좌표와 세계 좌표 간 변환을 수행할 수 있으며, 이를 통해 투영(projection) 및 역투영(back-projection) 작업을 지원합니다. 자세한 내용은 pointTrack 항목, triangulate 항목, img2world2d 항목을 참조하십시오.
이 툴박스는 특수한 객체를 사용하여 영상 데이터와 점 데이터를 관리하고 구성할 수 있는 기능을 제공합니다. 이러한 구조를 통해 대규모 복원 파이프라인을 위한 자세 그래프를 생성하고 최적화할 수 있습니다. 이 툴박스는 3차원 공간에서 카메라 위치와 복원된 포인트 클라우드를 시각화하는 기능도 지원합니다. 자세한 내용은 imageviewset 항목, createPoseGraph 항목, plotCamera 항목을 참조하십시오.
함수
도움말 항목
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (R2026a 이후)
- Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
- 카메라 보정이란?
영상 또는 비디오 카메라의 렌즈 및 영상 센서에 대한 파라미터를 추정합니다.
추천 예제

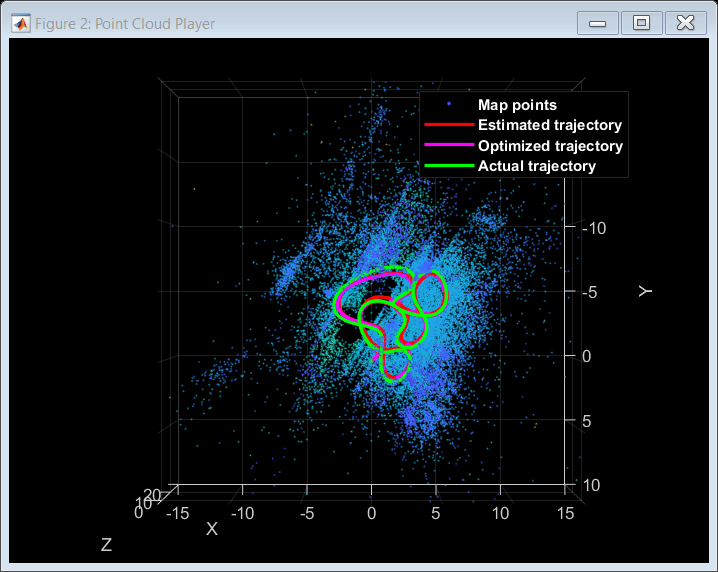
Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).

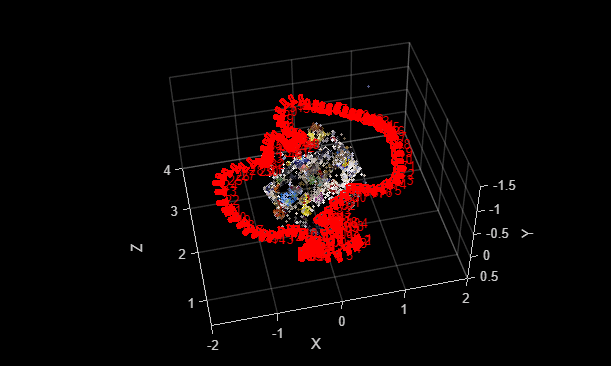
Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.
Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor.
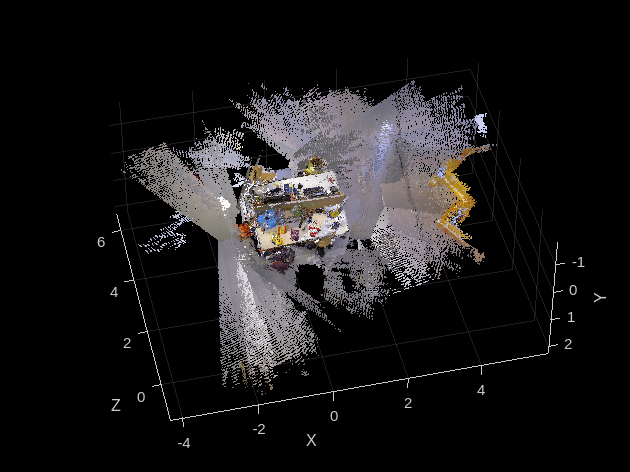
Visual SLAM with RGB-D Camera
Process RGB-D image data to build a map of an indoor environment and estimate the trajectory of the camera.
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.

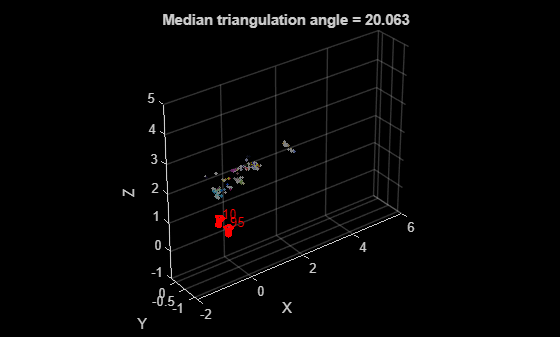
두 시점에서의 움직임 기반 구조
2차원 영상 세트로부터 장면의 3차원 구조를 추정합니다.

Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.
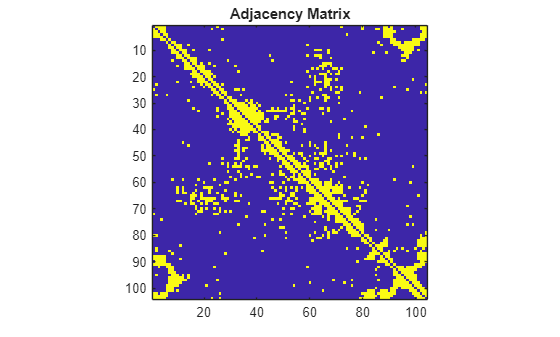
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
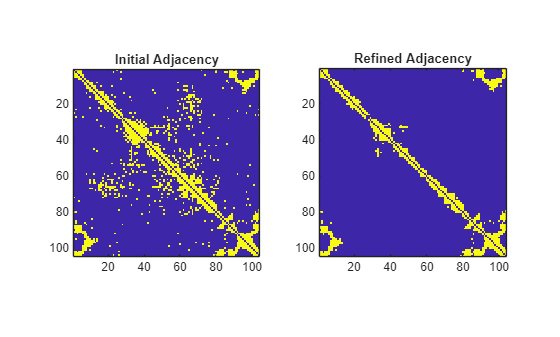
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.