Visual SLAM with RGB-D Camera
Visual simultaneous localization and mapping (vSLAM), refers to the process of calculating the position and orientation of a camera with respect to its surroundings, while simultaneously mapping the environment. You can perform vSLAM using a monocular camera. However, the depth cannot be accurately calculated, and the estimated trajectory is unknown and drifts over time. To produce an initial map, which cannot be triangulated from the first frame, you must use multiple views of a monocular camera. A better, more reliable solution is to use an RGB-D camera, which is composed of one RGB color image and one depth image.
There are two versions of RGB-D visual SLAM implementations shown in the examples:
Modular and Modifiable ─ Builds a visual SLAM pipeline step-by-step by using functions and objects. For more details and a list of these functions and objects, see the Implement Visual SLAM in MATLAB topic. The approach described in the topic contains modular code and it is designed to teach the details of the vSLAM implementation, which is loosely based on the popular and reliable ORB-SLAM [1] algorithm. The code is easily navigable, allowing you to understand the algorithm and test how its parameters can impact the performance of the system. This modular implementation is most suitable for learning, experimentation, and modification to test your own ideas.
Performant and Deployable ─ Uses the
rgbdvslamobject which contains a complete vSLAM workflow. The object offers a practical solution with greatly improved execution speed and code generation. To generate multi-threaded C/C++ code fromrgbdvslam, you can use MATLAB® Coder™. The generated code is portable and can also be deployed on non-PC hardware.
This example shows the Modular and Modifiable implementation.
Overview of Processing Pipeline
The pipeline for RGB-D vSLAM is very similar to the monocular vSLAM pipeline in the Monocular Visual Simultaneous Localization and Mapping example. The major difference is that in the Map Initialization stage, the 3-D map points are created from a pair of images consisting of one color image and one depth image instead of two frames of color images.

Map Initialization: The initial 3-D world points can be constructed by extracting ORB feature points from the color image and then computing their 3-D world locations from the depth image. The color image is stored as the first key frame.
Tracking: Once a map is initialized, the pose of the camera is estimated for each new RGB-D image by matching features in the color image to features in the last key frame.
Local Mapping: If the current color image is identified as a key frame, new 3-D map points are computed from the depth image. At this stage, bundle adjustment is used to minimize reprojection errors by adjusting the camera pose and 3-D points.
Loop Closure: Loops are detected for each key frame by comparing it against all previous key frames using the bag-of-features approach. Once a loop closure is detected, the pose graph is optimized to refine the camera poses of all the key frames.
Download and Explore the Input Image Sequence
The data used in this example is from the TUM RGB-D benchmark [2]. You can download the data to a temporary folder using a web browser or by running the following code:
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir, 'tum_rgbd_dataset', filesep); options = weboptions('Timeout', Inf); tgzFileName = [dataFolder, 'fr3_office.tgz']; folderExists = exist(dataFolder, 'dir'); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder); disp('Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.') websave(tgzFileName, baseDownloadURL, options); % Extract contents of the downloaded file disp('Extracting fr3_office.tgz (1.38 GB) ...') untar(tgzFileName, dataFolder); end imageFolder = fullfile(dataFolder, 'rgbd_dataset_freiburg3_long_office_household');
Create two imageDatastore objects to store the color and depth images, respectively.
imgFolderColor = fullfile(imageFolder,'rgb'); imgFolderDepth = fullfile(imageFolder,'depth'); imdsColor = imageDatastore(imgFolderColor); imdsDepth = imageDatastore(imgFolderDepth);
Note that the color and depth images are generated in an un-synchronized way in the dataset. Therefore, we need to associate color images to depth images based on the time stamp.
% Load time stamp data of color images timeColor = helperImportTimestampFile(fullfile(imageFolder,'rgb.txt')); % Load time stamp data of depth images timeDepth = helperImportTimestampFile(fullfile(imageFolder,'depth.txt')); % Align the time stamp indexPairs = helperAlignTimestamp(timeColor, timeDepth); % Select the synchronized image data imdsColor = subset(imdsColor, indexPairs(:, 1)); imdsDepth = subset(imdsDepth, indexPairs(:, 2)); % Inspect the first RGB-D image currFrameIdx = 1; currIcolor = readimage(imdsColor, currFrameIdx); currIdepth = readimage(imdsDepth, currFrameIdx); imshowpair(currIcolor, currIdepth, "montage");

Map Initialization
The pipeline starts by initializing the map that holds 3-D world points. This step is crucial and has a significant impact on the accuracy of the final SLAM result. Initial ORB feature points are extracted from the first color image using helperDetectAndExtractFeatures. Their corresponding 3-D world locations can be computed from the pixel coordinates of the feature points and the depth value using helperReconstructFromRGBD.
% Set random seed for reproducibility rng(0); % Create a cameraIntrinsics object to store the camera intrinsic parameters. % The intrinsics for the dataset can be found at the following page: % https://vision.in.tum.de/data/datasets/rgbd-dataset/file_formats focalLength = [535.4, 539.2]; % in units of pixels principalPoint = [320.1, 247.6]; % in units of pixels imageSize = size(currIcolor,[1,2]); % in pixels [mrows, ncols] depthFactor = 5e3; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); % Detect and extract ORB features from the color image scaleFactor = 1.2; numLevels = 8; numPoints = 1000; [currFeatures, currPoints] = helperDetectAndExtractFeatures(currIcolor, scaleFactor, numLevels, numPoints); initialPose = rigidtform3d(); [xyzPoints, validIndex] = helperReconstructFromRGBD(currPoints, currIdepth, intrinsics, initialPose, depthFactor);
Initialize Place Recognition Database
Loop detection is performed using the bags-of-words approach. A visual vocabulary represented as a bagOfFeatures object is created offline with the ORB descriptors extracted from a large set of images in the dataset by calling:
bag = bagOfFeatures(imds,CustomExtractor=@helperORBFeatureExtractorFunction, TreeProperties=[5, 10], StrongestFeatures=1);
where imds is an imageDatastore object storing the training images and helperORBFeatureExtractorFunction is the ORB feature extractor function. See Image Retrieval with Bag of Visual Words for more information.
The loop closure process incrementally builds a database, represented as an invertedImageIndex object, that stores the visual word-to-image mapping based on the bag of ORB features.
% Load the bag of features data created offline bofData = load("bagOfFeaturesDataSLAM.mat"); % Initialize the place recognition database loopDatabase = invertedImageIndex(bofData.bof, SaveFeatureLocations=false); % Add features of the first key frame to the database currKeyFrameId = 1; addImageFeatures(loopDatabase, currFeatures, currKeyFrameId);
Data Management and Visualization
After the map is initialized using the first pair of color and depth image, you can use imageviewset and worldpointset to store the first key frames and the corresponding map points:
% Create an empty imageviewset object to store key frames vSetKeyFrames = imageviewset; % Create an empty worldpointset object to store 3-D map points mapPointSet = worldpointset; % Add the first key frame vSetKeyFrames = addView(vSetKeyFrames, currKeyFrameId, initialPose, Points=currPoints,... Features=currFeatures.Features); % Add 3-D map points [mapPointSet, rgbdMapPointsIdx] = addWorldPoints(mapPointSet, xyzPoints); % Add observations of the map points mapPointSet = addCorrespondences(mapPointSet, currKeyFrameId, rgbdMapPointsIdx, validIndex); % Update view direction and depth mapPointSet = updateLimitsAndDirection(mapPointSet, rgbdMapPointsIdx, vSetKeyFrames.Views); % Update representative view mapPointSet = updateRepresentativeView(mapPointSet, rgbdMapPointsIdx, vSetKeyFrames.Views); % Visualize matched features in the first key frame featurePlot = helperVisualizeMatchedFeaturesRGBD(currIcolor, currIdepth, currPoints(validIndex)); % Visualize initial map points and camera trajectory xLim = [-4 4]; yLim = [-3 1]; zLim = [-1 6]; mapPlot = helperVisualizeMotionAndStructure(vSetKeyFrames, mapPointSet, xLim, yLim, zLim); % Show legend showLegend(mapPlot);
Tracking
The tracking process is performed using every RGB-D image and determines when to insert a new key frame.
% ViewId of the last key frame lastKeyFrameId = currKeyFrameId; % Index of the last key frame in the input image sequence lastKeyFrameIdx = currFrameIdx; % Indices of all the key frames in the input image sequence addedFramesIdx = lastKeyFrameIdx; currFrameIdx = 2; isLoopClosed = false;
Each frame is processed as follows:
ORB features are extracted for each new frame and then matched with features in the last key frame that have known corresponding 3-D map points. Assuming a linear camera motion model, the expected matched locations in the current frame that correspond to the feature points from the last key frame can be predicted using
vision.PointTracker.With 3-D to 2-D correspondence in the current frame, estimate the camera pose with the Perspective-n-Point algorithm using
estworldposeand refine the camera pose by performing a motion-only bundle adjustment usingbundleAdjustmentMotion.Project the local map points into the current frame to search for more feature correspondences using
matchFeaturesInRadiusand refine the camera pose again usingbundleAdjustmentMotion.The last step of tracking is to decide if the current frame should be a new key frame. A frame is a key frame if both of the following conditions are satisfied:
At least 20 frames have passed since the last key frame or the current frame tracks fewer than 100 map points or 25% of points tracked by the reference key frame.
The map points tracked by the current frame are fewer than 90% of points tracked by the reference key frame.
If the current frame is to become a key frame, continue to the Local Mapping process. Otherwise, start Tracking for the next frame.
% Main loop isLastFrameKeyFrame = true; % Create and initialize the KLT tracker tracker = vision.PointTracker(MaxBidirectionalError = 5); initialize(tracker, currPoints.Location(validIndex, :), currIcolor); while currFrameIdx < numel(imdsColor.Files) currIcolor = readimage(imdsColor, currFrameIdx); currIdepth = readimage(imdsDepth, currFrameIdx); [currFeatures, currPoints] = helperDetectAndExtractFeatures(currIcolor, scaleFactor, numLevels, numPoints); % Track the last key frame % trackedMapPointsIdx: Indices of the map points observed in the current left frame % trackedFeatureIdx: Indices of the corresponding feature points in the current left frame [currPose, trackedMapPointsIdx, trackedFeatureIdx] = helperTrackLastKeyFrameKLT(tracker, currIcolor, mapPointSet, ... vSetKeyFrames.Views, currFeatures, currPoints, lastKeyFrameId, intrinsics); if isempty(currPose) || numel(trackedMapPointsIdx) < 20 currFrameIdx = currFrameIdx + 1; continue end % Track the local map and check if the current frame is a key frame. % A frame is a key frame if both of the following conditions are satisfied: % % 1. At least 20 frames have passed since the last key frame or the % current frame tracks fewer than 120 map points. % 2. The map points tracked by the current frame are fewer than 90% of % points tracked by the reference key frame. % % localKeyFrameIds: ViewId of the connected key frames of the current frame numSkipFrames = 20; numPointsKeyFrame = 120; [localKeyFrameIds, currPose, trackedMapPointsIdx, trackedFeatureIdx, isKeyFrame] = ... helperTrackLocalMap(mapPointSet, vSetKeyFrames, trackedMapPointsIdx, ... trackedFeatureIdx, currPose, currFeatures, currPoints, intrinsics, scaleFactor, ... isLastFrameKeyFrame, lastKeyFrameIdx, currFrameIdx, numSkipFrames, numPointsKeyFrame); % Visualize matched features updatePlot(featurePlot, currIcolor, currIdepth, currPoints(trackedFeatureIdx)); if ~isKeyFrame currFrameIdx = currFrameIdx + 1; isLastFrameKeyFrame = false; continue else % Match feature points between the stereo images and get the 3-D world positions [xyzPoints, validIndex] = helperReconstructFromRGBD(currPoints, currIdepth, ... intrinsics, currPose, depthFactor); [untrackedFeatureIdx, ia] = setdiff(validIndex, trackedFeatureIdx); xyzPoints = xyzPoints(ia, :); isLastFrameKeyFrame = true; end % Update current key frame ID currKeyFrameId = currKeyFrameId + 1;
Local Mapping
Local mapping is performed for every key frame. When a new key frame is determined, add it to the key frames and update the attributes of the map points observed by the new key frame. To ensure that mapPointSet contains as few outliers as possible, a valid map point must be observed in at least 3 key frames.
New map points are created by triangulating ORB feature points in the current key frame and its connected key frames. For each unmatched feature point in the current key frame, search for a match with other unmatched points in the connected key frames using matchFeatures. The local bundle adjustment refines the pose of the current key frame, the poses of connected key frames, and all the map points observed in these key frames.
% Add the new key frame [mapPointSet, vSetKeyFrames] = helperAddNewKeyFrame(mapPointSet, vSetKeyFrames, ... currPose, currFeatures, currPoints, trackedMapPointsIdx, trackedFeatureIdx, localKeyFrameIds); % Remove outlier map points that are observed in fewer than 3 key frames if currKeyFrameId == 2 triangulatedMapPointsIdx = []; end [mapPointSet, trackedMapPointsIdx] = ... helperCullRecentMapPointsRGBD(mapPointSet, trackedMapPointsIdx, triangulatedMapPointsIdx, ... rgbdMapPointsIdx); % Add new map points computed from disparity [mapPointSet, rgbdMapPointsIdx] = addWorldPoints(mapPointSet, xyzPoints); mapPointSet = addCorrespondences(mapPointSet, currKeyFrameId, rgbdMapPointsIdx, ... untrackedFeatureIdx); % Create new map points by triangulation minNumMatches = 10; minParallax = 1; [mapPointSet, vSetKeyFrames, triangulatedMapPointsIdx, rgbdMapPointsIdx] = helperCreateNewMapPointsStereo( ... mapPointSet, vSetKeyFrames, currKeyFrameId, intrinsics, scaleFactor, minNumMatches, minParallax, ... untrackedFeatureIdx, rgbdMapPointsIdx); % Update view direction and depth mapPointSet = updateLimitsAndDirection(mapPointSet, [triangulatedMapPointsIdx; rgbdMapPointsIdx], ... vSetKeyFrames.Views); % Update representative view mapPointSet = updateRepresentativeView(mapPointSet, [triangulatedMapPointsIdx; rgbdMapPointsIdx], ... vSetKeyFrames.Views); % Local bundle adjustment [mapPointSet, vSetKeyFrames, triangulatedMapPointsIdx, rgbdMapPointsIdx] = ... helperLocalBundleAdjustmentStereo(mapPointSet, vSetKeyFrames, ... currKeyFrameId, intrinsics, triangulatedMapPointsIdx, rgbdMapPointsIdx); % Visualize 3-D world points and camera trajectory updatePlot(mapPlot, vSetKeyFrames, mapPointSet); % Set the feature points to be tracked [~, index2d] = findWorldPointsInView(mapPointSet, currKeyFrameId); setPoints(tracker, currPoints.Location(index2d, :));
Loop Closure
The loop closure detection step takes the current key frame processed by the local mapping process and tries to detect and close the loop. Loop candidates are identified by querying images in the database that are visually similar to the current key frame using evaluateImageRetrieval. A candidate key frame is valid if it is not connected to the last key frame and three of its neighbor key frames are loop candidates.
When a valid loop candidate is found, use estgeotform3d to compute the relative pose between the loop candidate frame and the current key frame. The relative pose represents a 3-D rigid transformation stored in a rigidtform3d object. Then add the loop connection with the relative pose and update mapPointSet and vSetKeyFrames.
% Check loop closure after some key frames have been created if currKeyFrameId > 20 % Minimum number of feature matches of loop edges loopEdgeNumMatches = 120; % Detect possible loop closure key frame candidates [isDetected, validLoopCandidates] = helperCheckLoopClosureT(vSetKeyFrames, currKeyFrameId, ... loopDatabase, currIcolor, loopEdgeNumMatches); if isDetected % Add loop closure connections maxDistance = 0.1; [isLoopClosed, mapPointSet, vSetKeyFrames] = helperAddLoopConnectionsStereo(... mapPointSet, vSetKeyFrames, validLoopCandidates, currKeyFrameId, ... currFeatures, currPoints, loopEdgeNumMatches, maxDistance); end end % If no loop closure is detected, add current features into the database if ~isLoopClosed addImageFeatures(loopDatabase, currFeatures, currKeyFrameId); end % Update IDs and indices lastKeyFrameId = currKeyFrameId; lastKeyFrameIdx = currFrameIdx; addedFramesIdx = [addedFramesIdx; currFrameIdx]; %#ok<AGROW> currFrameIdx = currFrameIdx + 1; end % End of main loop
Loop edge added between keyframe: 4 and 87 Loop edge added between keyframe: 5 and 87 Loop edge added between keyframe: 4 and 88

Finally, apply pose graph optimization over the essential graph in vSetKeyFrames to correct the drift. The essential graph is created internally by removing connections with fewer than minNumMatches matches in the covisibility graph. After pose graph optimization, update the 3-D locations of the map points using the optimized poses.
% Optimize the poses minNumMatches = 50; vSetKeyFramesOptim = optimizePoses(vSetKeyFrames, minNumMatches, Tolerance=1e-16); % Update map points after optimizing the poses mapPointSet = helperUpdateGlobalMap(mapPointSet, vSetKeyFrames, vSetKeyFramesOptim); updatePlot(mapPlot, vSetKeyFrames, mapPointSet); % Plot the optimized camera trajectory optimizedPoses = poses(vSetKeyFramesOptim); plotOptimizedTrajectory(mapPlot, optimizedPoses) % Update legend showLegend(mapPlot);
Compare with the Ground Truth
You can compare the optimized camera trajectory with the ground truth to evaluate the accuracy. The downloaded data contains a groundtruth.txt file that stores the ground truth of camera pose of each frame. The data has been saved in the form of a MAT-file. You can also calculate the root-mean-square-error (RMSE) of trajectory estimates.
% Load ground truth gTruthData = load("orbslamGroundTruth.mat"); gTruth = gTruthData.gTruth; % Plot the actual camera trajectory plotActualTrajectory(mapPlot, gTruth(indexPairs(addedFramesIdx, 1)), optimizedPoses); % Show legend showLegend(mapPlot);

% Evaluate tracking accuracy errorMetrics = compareTrajectories(optimizedPoses.AbsolutePose, gTruth(indexPairs(addedFramesIdx, 1))); disp(['Absolute RMSE for key frame location (m): ', num2str(errorMetrics.AbsoluteRMSE(2))]);
Absolute RMSE for key frame location (m): 0.1271
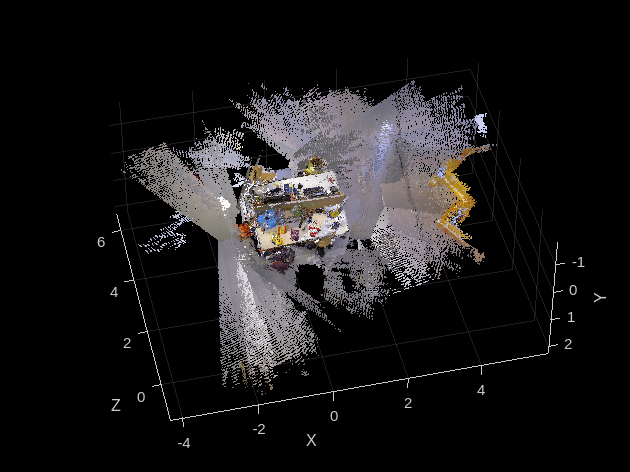
Dense Reconstruction from Depth Image
Given the refined camera poses, you can reproject all the valid image points in the associated depth images back to the 3-D space to perform dense reconstruction.
% Create an array of pointCloud objects to store the world points constructed % from the key frames ptClouds = repmat(pointCloud(zeros(1, 3)), numel(addedFramesIdx), 1); % Ignore image points at the boundary offset = 40; [X, Y] = meshgrid(offset:2:imageSize(2)-offset, offset:2:imageSize(1)-offset); for i = 1: numel(addedFramesIdx) Icolor = readimage(imdsColor, addedFramesIdx(i)); Idepth = readimage(imdsDepth, addedFramesIdx(i)); [xyzPoints, validIndex] = helperReconstructFromRGBD([X(:), Y(:)], ... Idepth, intrinsics, optimizedPoses.AbsolutePose(i), depthFactor); colors = zeros(numel(X), 1, 'like', Icolor); for j = 1:numel(X) colors(j, 1:3) = Icolor(Y(j), X(j), :); end ptClouds(i) = pointCloud(xyzPoints, Color=colors(validIndex, :)); end % Concatenate the point clouds pointCloudsAll = pccat(ptClouds); figure pcshow(pointCloudsAll,VerticalAxis="y", VerticalAxisDir="down"); xlabel('X') ylabel('Y') zlabel('Z')
Code Generation
Because code generation does not support ImageDatastore objects, read the input images, and store them in a cell array.
for i = 1:numel(imdsColor.Files) imagesColor{i,1} = im2gray(readimage(imdsColor,i)); end for i = 1:numel(imdsDepth.Files) imagesDepth{i,1} = readimage(imdsDepth,i); end
Use the helperRGBDVisualSLAMCodegen function to generate C++ code for deployment on a host computer. To meet the requirements of MATLAB Coder, you must restructure the code to isolate the algorithm from the visualization code. The helperRGBDVisualSLAMCodegen function encapsulates the algorithmic process of map initialization, tracking, local mapping, and loop closure. The function takes two cell arrays of images, imagesColor, and imagesDepth, as inputs and outputs 3-D worldpointset, estimated camera poses, and indices of all the key frames.
Use the Compilation Directive %#codegen (MATLAB Coder) command to compile the helperRGBDVisualSLAMCodegen function into a MEX file. Note that, by default, the generated MEX file has the same name as the original MATLAB function with "_mex" appended as a suffix: helperRGBDVisualSLAMCodegen_mex. To save the MEX file with a custom filename, use the -o option. You can specify the -report option to generate a compilation report that shows the original MATLAB code and the associated files created during code generation. You can also create a temporary directory where MATLAB Coder can store the generated files. For more options related to MEX file generation, see options (MATLAB Coder) on the codegen page.
cpuConfig = coder.config("mex"); cpuConfig.TargetLang = "C++"; % Generate C++ code codegen -config cpuConfig helperRGBDVisualSLAMCodegen -args {imagesColor,imagesDepth}
Code generation successful.
Supporting Functions
This example includes these helper functions as separate files:
helperDetectAndExtractFeatures — Detects and extracts ORB features from the image.
helperReconstructFromRGBD — Reconstructs the scene from the color and depth images.
helperCullRecentMapPointsRGBD — Culls recently added map points.
helperAddLoopConnectionsStereo — Adds connections between the current key frame and the valid loop candidate key frames.
helperAddNewKeyFrame — Adds key frames to the key frame set.
helperCheckLoopClosureT — Detects loop candidate key frames by retrieving visually similar images from the feature database.
helperCreateNewMapPointsStereo — Creates new map points by triangulating matched feature points in the current key frame and the connected key frames.
helperLocalBundleAdjustmentStereo — Refines the pose of the current key frame and the map of the surrounding scene.
helperORBFeatureExtractorFunction — Implements the ORB feature extraction used by the bagOfFeatures.
helperRGBDVisualSLAMCodegen — Contains the algorithm for codegen for RGB-D visual SLAM.
helperTrackLastKeyFrameKLT — Estimate the current camera pose by tracking the last key frame using the KLT tracker.
helperTrackLocalMap — Refines the camera pose by tracking the local map.
helperVisualizeMatchedFeaturesRGBD — Shows the matched features in a frame.
helperVisualizeRGBDVisualSlam — Shows the codegen results of RGB-D vSLAM.
The example also uses these helper functions:
helperImportTimestampFile — Imports the timestamp file.
function timestamp = helperImportTimestampFile(filename) % Input handling dataLines = [4 Inf]; %% Set up the Import Options and import the data opts = delimitedTextImportOptions("NumVariables",2); % Specify range and delimiter opts.DataLines = dataLines; opts.Delimiter = " "; % Specify column names and types opts.VariableNames = ["VarName1","Var2"]; opts.SelectedVariableNames = "VarName1"; opts.VariableTypes = ["double","string"]; % Specify file level properties opts.ExtraColumnsRule = "ignore"; opts.EmptyLineRule = "read"; opts.ConsecutiveDelimitersRule = "join"; opts.LeadingDelimitersRule = "ignore"; % Specify variable properties opts = setvaropts(opts,"Var2","WhitespaceRule","preserve"); opts = setvaropts(opts,"Var2","EmptyFieldRule","auto"); % Import the data data = readtable(filename,opts); % Convert to output type timestamp = table2array(data); end
helperAlignTimestamp — Aligns the timestamps of the color and depth images.
function indexPairs = helperAlignTimestamp(timeColor,timeDepth) idxDepth = 1; indexPairs = zeros(numel(timeColor),2); for i = 1:numel(timeColor) for j = idxDepth:numel(timeDepth) if abs(timeColor(i)-timeDepth(j)) < 1e-4 idxDepth = j; indexPairs(i,:) = [i,j]; break elseif timeDepth(j)-timeColor(i) > 1e-3 break end end end indexPairs = indexPairs(indexPairs(:,1)>0,:); end
helperEstimateTrajectoryError — Calculates the tracking error.
function rmse = helperEstimateTrajectoryError(gTruth,cameraPoses) locations = vertcat(cameraPoses.AbsolutePose.Translation); gLocations = vertcat(gTruth.Translation); scale = median(vecnorm(gLocations,2,2))/median(vecnorm(locations,2,2)); scaledLocations = locations*scale; rmse = sqrt(mean(sum((scaledLocations-gLocations).^2,2))); disp(["Absolute RMSE for key frame trajectory (m): ",num2str(rmse)]); end
helperUpdateGlobalMap — Updates the 3-D locations of map points after pose graph optimization.
function mapPointSet = helperUpdateGlobalMap(mapPointSet,vSetKeyFrames,vSetKeyFramesOptim) posesOld = vSetKeyFrames.Views.AbsolutePose; posesNew = vSetKeyFramesOptim.Views.AbsolutePose; positionsOld = mapPointSet.WorldPoints; positionsNew = positionsOld; indices = 1:mapPointSet.Count; % Update world location of each map point based on the new absolute pose of % the corresponding major view for i = 1: mapPointSet.Count majorViewIds = mapPointSet.RepresentativeViewId(i); tform = rigidtform3d(posesNew(majorViewIds).A/posesOld(majorViewIds).A); positionsNew(i,:) = transformPointsForward(tform,positionsOld(i,:)); end mapPointSet = updateWorldPoints(mapPointSet,indices,positionsNew); end
References
[1] Mur-Artal, Raul, and Juan D. Tardós. “ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras.” IEEE Transactions on Robotics 33, no. 5 (October 2017): 1255–62. https://doi.org/10.1109/TRO.2017.2705103.
[2] Sturm, Jürgen, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. “A Benchmark for the Evaluation of RGB-D SLAM Systems.” In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 573–80, 2012.https://doi.org/10.1109/IROS.2012.6385773.