3차원 비전
3차원 비전은 시각 데이터를 사용하여 세계의 3차원 구조를 이해하고 복원할 수 있도록 합니다. Computer Vision Toolbox™를 사용하면 에피폴라 지오메트리를 기반으로 카메라 자세를 추정하고, 여러 뷰로부터 3차원 점을 삼각측량하고, 번들 조정을 통해 결과를 미세 조정할 수 있습니다. 또한 이 툴박스는 스테레오 카메라 보정, 영상 편위수정(영상 정렬), 시차 지도 계산, 조밀한 3차원 복원을 포함한 스테레오 비전 워크플로도 지원합니다. 아울러 다중 뷰 지오메트리를 사용하여 정확한 3차원 장면 복원을 수행할 수 있도록 영상 데이터와 점 데이터를 관리하고, 자세 그래프를 작성하고, 공간 관계를 시각화하는 툴을 제공합니다.
단안 카메라, 스테레오 카메라 또는 RGB-D 카메라 입력으로부터 실시간으로 시각 SLAM을 수행하여 카메라의 위치를 추정하면서 동시에 주변 환경의 맵을 작성할 수 있습니다. 이 툴박스는 시각 SLAM과 함께 관성 센서 융합을 지원하여 위치추정 정확도를 향상시킵니다. 궤적을 시각화하고 궤적의 정확도를 평가하며, 코드 생성을 사용하여 시각 SLAM을 배포할 수 있습니다.
이 툴박스는 또한 포괄적인 움직임 기반 구조(SfM) 파이프라인을 제공하며, 이를 통해 서로 다른 시점에서 촬영된 여러 2차원 영상으로부터 3차원 장면을 복원할 수 있습니다. 특징을 검출 및 매칭하고, 카메라 자세를 추정하고, 점을 삼각측량하고, 번들 조정을 사용하여 결과를 미세 조정할 수 있습니다. 조밀한 복원과 새로운 뷰 합성에 NeRF(Neural Radiance Fields: 신경 방사 필드)를 적용할 수도 있습니다.
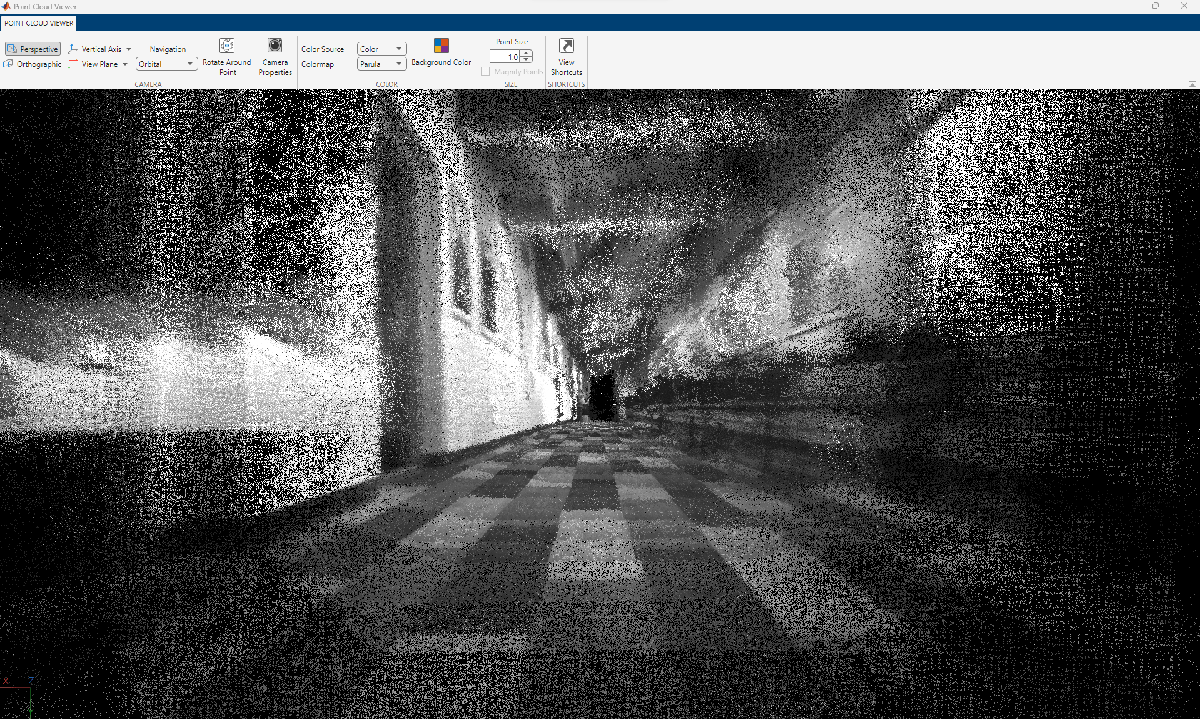
마지막으로, 3차원 포인트 클라우드를 처리하여 매핑, 위치추정, 객체 모델링을 지원할 수도 있습니다. 포인트 클라우드 데이터를 전처리, 시각화, 정합하고 포인트 클라우드 데이터에 기하 형태를 피팅할 수 있습니다. 이 툴박스는 3차원 포인트 클라우드를 사용한 맵 작성과 SLAM 알고리즘 구현을 지원합니다.
카테고리
- 카메라 자세 추정과 3차원 복원
3차원 복원을 위해 기본적인 에피폴라 지오메트리, 삼각측량, 번들 조정을 사용하여 카메라 자세 추정
- 스테레오 비전
스테레오 카메라 보정, 편위수정, 시차 추정 및 조밀한 3차원 복원
- 시각 SLAM
단안 카메라, RGB-D 카메라 또는 스테레오 카메라를 사용한 실시간 시각 기반의 위치추정 및 지도작성(vSLAM), 배포 지원을 포함한 관성 센서 융합
- 움직임 기반 구조
증분 움직임 기반 구조와 NeRF를 사용하여 여러 뷰로부터 3차원 장면 구조 복원
- 포인트 클라우드 처리
기하학적 형상에 대해 전처리, 시각화, 정합, 피팅을 수행, 맵 작성, SLAM 알고리즘 구현, 3차원 포인트 클라우드에 딥러닝 사용
추천 예제

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
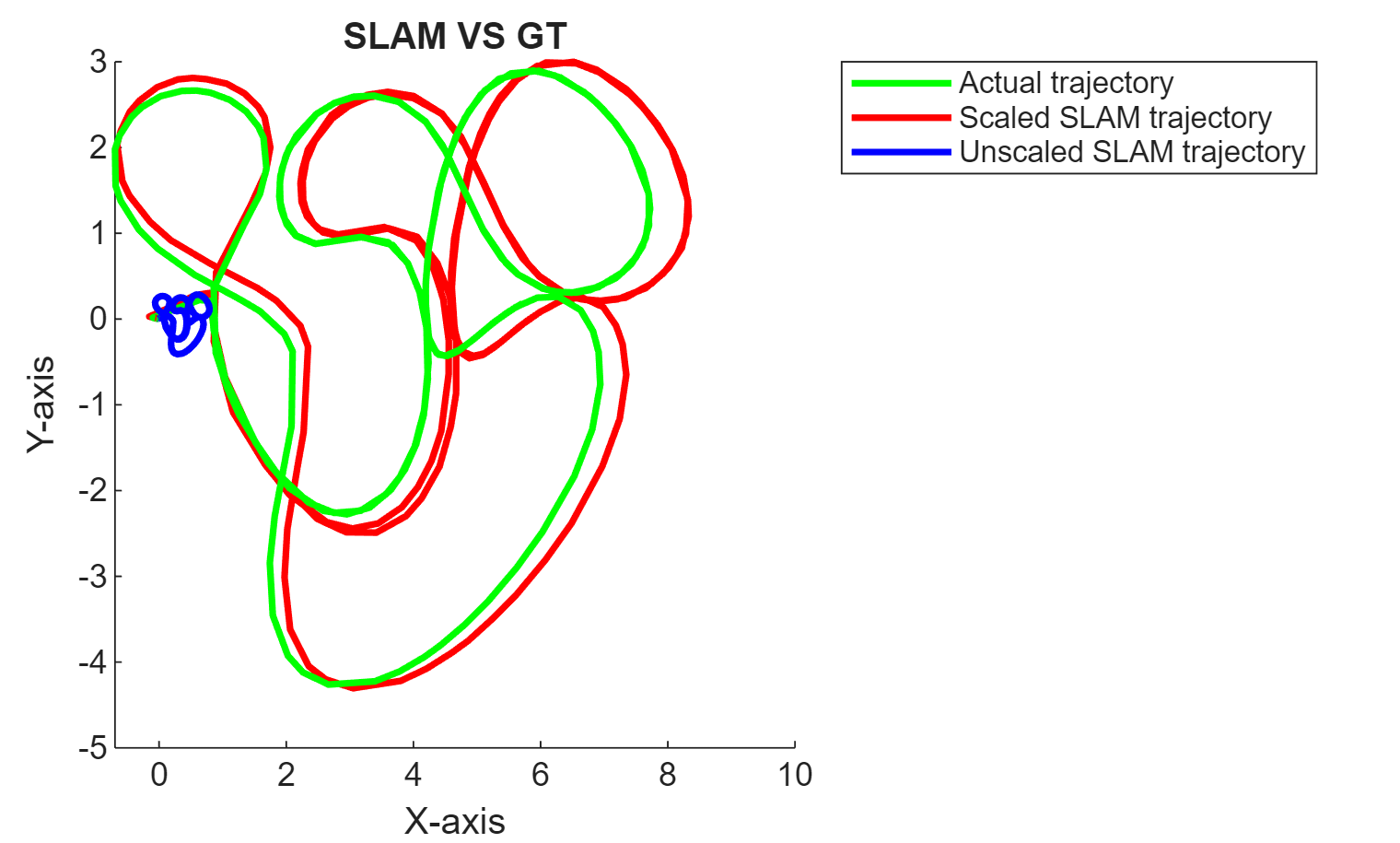
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.

Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
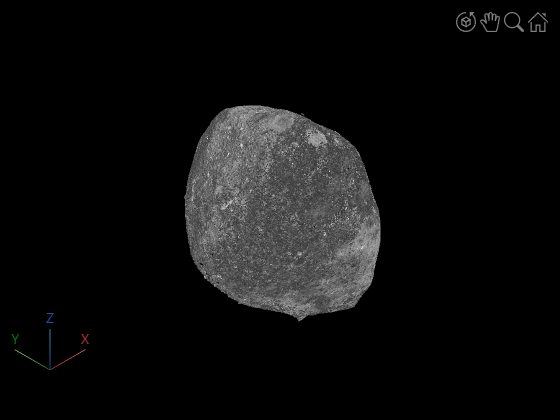
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.
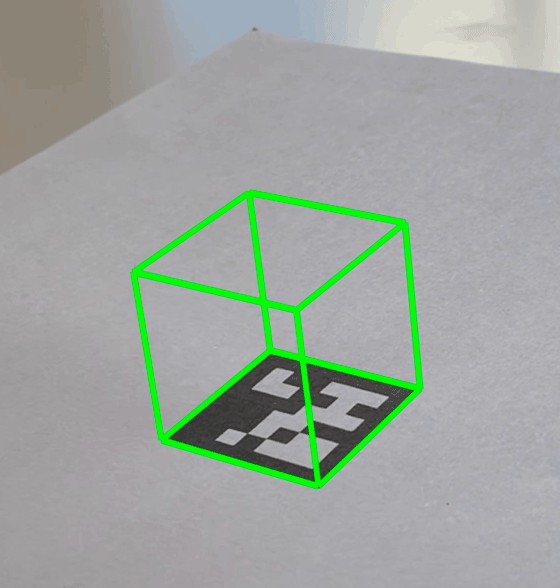
Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

스테레오 비디오에서 깊이 추정
보정된 스테레오 카메라로 촬영한 비디오에서 사람을 검출하고 카메라와의 거리를 확인합니다.

Uncalibrated Stereo Image Rectification
Compute rectification of two uncalibrated images.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.