시각 SLAM
시각 기반의 동시적 위치추정 및 지도작성(vSLAM)은 시각적 입력을 사용하여 환경 맵을 작성하면서 동시에 카메라의 위치와 방향을 추정하는 과정입니다. Computer Vision Toolbox™는 단안 카메라, RGB-D 카메라, 스테레오 카메라를 위한 vSLAM 워크플로를 지원하며, 정확도 향상을 위해 선택적으로 관성 센서 융합을 사용할 수 있습니다. 이러한 기능은 로보틱스, 증강현실, 자율 내비게이션의 응용 분야에 필수적입니다. vSLAM 워크플로 선택에 대한 지침은 Choose SLAM Workflow Based on Sensor Data 항목을 참조하십시오.
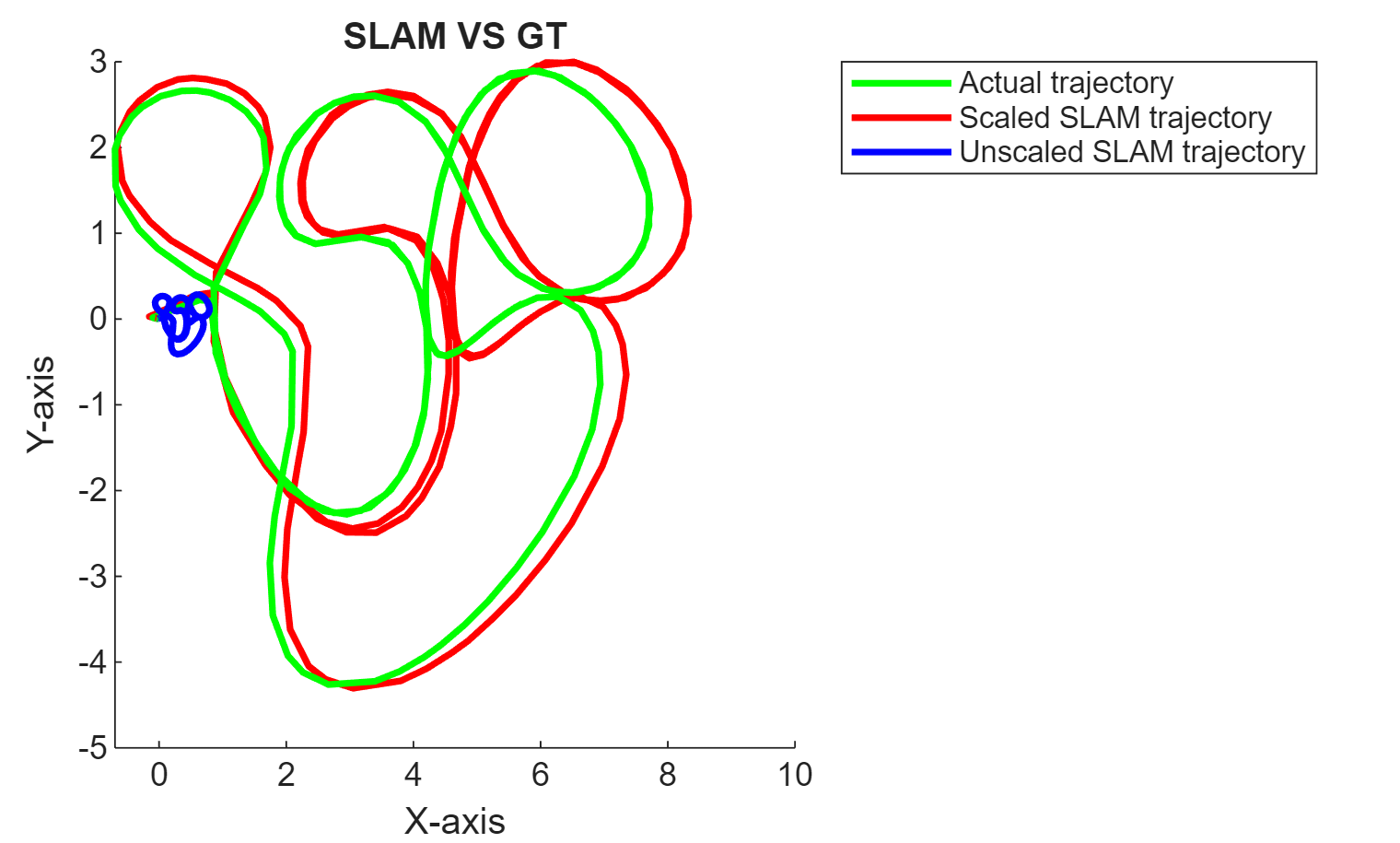
각 시각 SLAM 객체(monovslam, rgbdvslam, stereovslam)는 프레임 추가, 키프레임 추적, 3차원 맵 점 계산, 카메라 자세 추정, 루프 폐쇄, 카메라 궤적 전체에 대한 데이터 시각화를 위해 바로 사용 가능한 툴을 제공합니다. compareTrajectories 함수를 사용하면 추정된 카메라 궤적을 ground truth와 비교하여 vSLAM 알고리즘의 성능을 평가할 수도 있습니다. 이 툴박스는 자신만의 시각 SLAM 파이프라인을 구축할 수 있는 기능도 제공합니다.
이 툴박스를 사용하여 vSLAM 알고리즘의 코드 생성과 배포를 수행할 수 있습니다. 자세한 내용은 Build and Deploy Visual SLAM Algorithm with ROS in MATLAB 항목과 Performant and Deployable Monocular Visual SLAM 항목을 참조하십시오.
함수
도움말 항목
바로 사용 가능한 시각 SLAM 함수
- Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code. - Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time. (R2025a 이후) - Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features. - How to Improve Accuracy in Visual SLAM
Tips to improve the accuracy, robustness, and efficiency of your visual SLAM system.
자신만의 시각 SLAM 파이프라인 구축하기
- Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM). - Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor. - Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.
추천 예제

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Simulates an RGB-D visual simultaneous localization and mapping (SLAM) system to estimate the camera poses using data from a mobile robot in Gazebo.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Develop a visual SLAM algorithm for a UAV equipped with a stereo camera.

Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.

Estimate Camera-to-IMU Transformation Using Extrinsic Calibration
Estimate SE(3) transformation to define spatial relationship between camera and IMU.

Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from the Unreal Engine® simulation environment.