frest.Random
랜덤 입력 신호
설명
주파수 응답 추정을 위한 랜덤 입력 신호를 표현하기 위해 frest.Random 객체를 사용합니다. 랜덤 신호는 양의 진폭과 음의 진폭에 대해 각각 구간 [0 Amplitude] 또는 [Amplitude 0] 내에 균등하게 분포된 난수를 포함합니다.
랜덤 신호는 나이퀴스트 주파수에 이르기까지 모든 주파수에서 시스템을 균일하게 가진시킬 수 있기 때문에 유용합니다.
명령줄, 모델 선형기 또는 Frequency Response Estimator 블록에서 추정에 랜덤 입력 신호를 사용할 수 있습니다. 추정 알고리즘은 추정을 위해 지정한 입력 점에 신호를 주입하고 출력 점에서 응답을 측정합니다.
추정에 랜덤 입력 신호를 사용하는 경우 추정된 frd 모델에서 반환되는 주파수는 신호의 길이와 샘플링 시간에 따라 달라집니다. 이러한 주파수는 입력 신호의 고속 푸리에 변환에서 얻은 주파수입니다. 자세한 내용은 frestimate의 알고리즘 섹션을 참조하십시오.
입력 신호의 플롯을 보려면 plot(input)을 입력합니다. 입력 신호에 대한 timeseries 객체를 만들려면 generateTimeseries 명령을 사용하십시오.
생성
설명
입력 인수
속성
객체 함수
frestimate | Frequency response estimation of Simulink models |
generateTimeseries | 입력 신호에 대한 시간 영역 데이터 생성 |
frest.simCompare | Plot time-domain simulation of nonlinear and linear models |
frest.simView | Plot frequency response model in time- and frequency-domain |
getSimulationTime | Final time of simulation for frequency response estimation |
예제
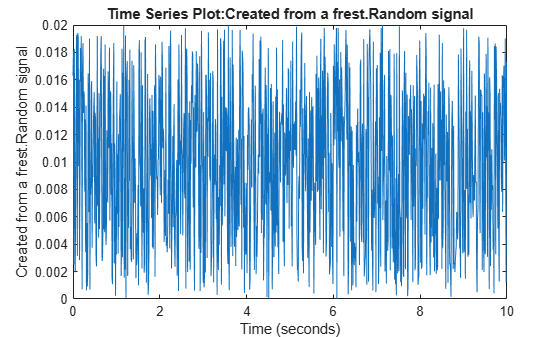
100Hz에서 1000개의 샘플을 추출하고 진폭이 0.02인 랜덤 입력 신호를 생성합니다.
input = frest.Random('Amplitude',0.02,... 'Ts',1/100,... 'NumSamples',1000);
랜덤 신호를 플로팅합니다.
plot(input)
승산식 시차 피보나치 수열(Multiplicative Lagged Fibonacci) 생성기 난수 스트림을 만듭니다.
stream = RandStream('mlfg6331_64','Seed',0);
이 스트림을 사용하여 랜덤 입력 신호를 만듭니다.
input = frest.Random('Stream',stream);대체 기능
모델 선형기
모델 선형기에서 랜덤 입력 신호를 추정에 사용하려면 추정 탭에서 입력 신호 > 랜덤을 선택하십시오.
버전 내역
R2009b에 개발됨