frest.Chirp
Swept-frequency cosine input signal
Description
Use a frest.Chirp object to represent a swept-frequency
cosine input signal for frequency response estimation. A swept-frequency cosine input signal,
or chirp signal, excites your system at a range of
frequencies, such that the input frequency changes instantaneously.
Chirp signals are useful when your system is nearly linear in the simulation range. They are also useful when you want to obtain a response quickly for a lot of frequency points. The frequency-response model that results when you use a chirp input contains only frequencies that fall within the range of the chirp.
You can use a chirp input signal for estimation at the command line, in the Model Linearizer, or with the Frequency Response Estimator block. The estimation algorithm injects the signal at the input point you specify for estimation, and measures the response at the output point. For more information, see Chirp Input Signals.
To view a plot of your input signal, type plot(input). To create a
timeseries object for your input signal, use the generateTimeseries command.
Creation
Description
input = frest.Chirp(sys)sys. For instance, if you have an exact linearization
of your system, you can use it to initialize the parameters.
input = frest.Chirp(Name,Value)
Input Arguments
Properties
Signal amplitude at each frequency, specified as a positive scalar.
Signal frequency range, specified as one of the following:
Two-element vector, for example
[w1 w2]Two-element cell array, for example
{w1 w2}
Here, w1 is the lower bound of the frequency range, and
w2 is the upper bound.
Frequency units, specified as one of the following:
'rad/s'— Radians per second'Hz'— Hertz
Changing frequency units does not impact frequency response estimation.
Sample time of the chirp signal in seconds, specified as a positive scalar. The default sample time, which avoids aliasing, is:
Here, FreqRange is specified in rad/s.
Number of samples in the chirp signal, specified as a positive integer. The default number of samples, which ensures that the estimation includes the lower end of the frequency range, is:
Here, FreqRange is specified in rad/s.
This property does not determine number of frequency points in the final estimation
result. The frestimate function only includes frequency points with
positive values. The function also discards any frequencies that fall outside the
frequency range specified for the chirp.
Method for evolution of instantaneous frequency, specified as one of the following.
| Method | Description |
|---|---|
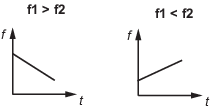
'linear' | Specifies the instantaneous frequency sweep fi(t): β ensures that the signal maintains the desired frequency breakpoint f1 at final time tf.
|
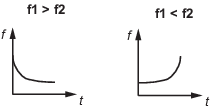
'logarithmic' | Specifies the instantaneous frequency sweep fi(t):
|
'quadratic' | Specifies the instantaneous frequency sweep fi(t): Specify the shape of the quadratic using the |
Quadratic sweep parabola shape, specified as one of the following:
'concave'— Concave quadratic sweeping shape.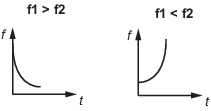
'convex'— Convex quadratic sweeping shape.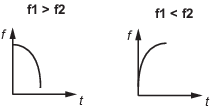
This property is available on when SweepMethod is
'quadratic'.
Initial phase of the Chirp signal in degrees, specified as a scalar.
Object Functions
frestimate | Frequency response estimation of Simulink models |
generateTimeseries | Generate time-domain data for input signal |
frest.simCompare | Plot time-domain simulation of nonlinear and linear models |
frest.simView | Plot frequency response model in time- and frequency-domain |
getSimulationTime | Final time of simulation for frequency response estimation |
Examples
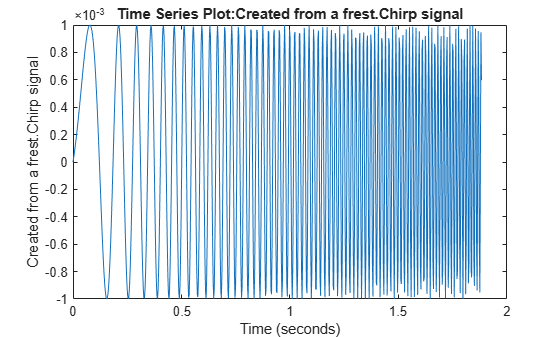
Create a chirp input signal with frequencies ranging from 10 to 500 rad/s. Specify the amplitude and the number of samples as well.
input = frest.Chirp('Amplitude',1e-3,... 'FreqRange',[10 500],... 'NumSamples',750)
The chirp input signal:
FreqRange : [10 500] (rad/s)
Amplitude : 0.001
Ts : 0.00251327412287183 (sec)
NumSamples : 750
InitialPhase : 270 (deg)
FreqUnits (rad/s or Hz): rad/s
SweepMethod(linear/ : linear
quadratic/
logarithmic)
Plot the chirp signal.
plot(input)
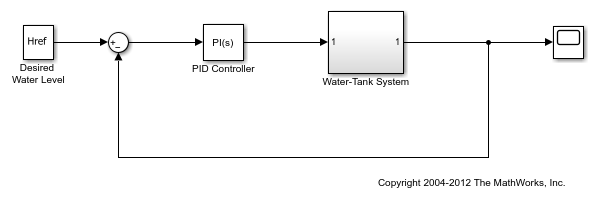
Create a chirp input signal based on the dynamics of a linear system. This approach is useful when you are using frequency response estimation to validate the linearization of your model.
Open a Simulink® model.
model = 'watertank';
open_system(model)
For this example, linearize the model at a steady-state operating point to obtain a state-space model you can use to initialize the chirp signal.
io(1)=linio('watertank/PID Controller',1,'input'); io(2)=linio('watertank/Water-Tank System',1,'openoutput'); watertank_spec = operspec(model); opOpts = findopOptions('DisplayReport','off'); op = findop(model,watertank_spec,opOpts); sys = linearize(model,op,io);
Create the chirp signal.
input = frest.Chirp(sys);
frest.Chirp chooses a frequency range based on the system dynamics. It also automatically initializes other parameters of the chirp signal.
input
The chirp input signal:
FreqRange : [0.001581138830107 0.1581138830107] (rad/s)
Amplitude : 1e-05
Ts : 7.94767061252222 (sec)
NumSamples : 1000
InitialPhase : 270 (deg)
FreqUnits (rad/s or Hz): rad/s
SweepMethod(linear/ : linear
quadratic/
logarithmic)
You can change properties of the signal using dot notation. For instance, increase the signal amplitude.
input.Amplitude = 3e-5
The chirp input signal:
FreqRange : [0.001581138830107 0.1581138830107] (rad/s)
Amplitude : 3e-05
Ts : 7.94767061252222 (sec)
NumSamples : 1000
InitialPhase : 270 (deg)
FreqUnits (rad/s or Hz): rad/s
SweepMethod(linear/ : linear
quadratic/
logarithmic)
Alternative Functionality
Model Linearizer
In the Model Linearizer, to use a chirp input signal for estimation, on the Estimation tab, select Input Signal > Chirp.
Version History
Introduced in R2009b