PID Gain Scheduler
Libraries:
Simulink Control Design /
Autotuning
Description
The PID Gain Scheduler block lets you lookup PID gains for the current state of the system from an array of gains, the corresponding breakpoint data, and the scheduling variable. The block uses lookup tables to associate specific PID gains with corresponding breakpoint values and provides dynamically adjusted PID gains based on the current operating point (scheduling variable). You can use these gains as inputs to the PID controller or other relevant blocks within the model. The lookup method can use interpolation, extrapolation, or the original values of the input gains.
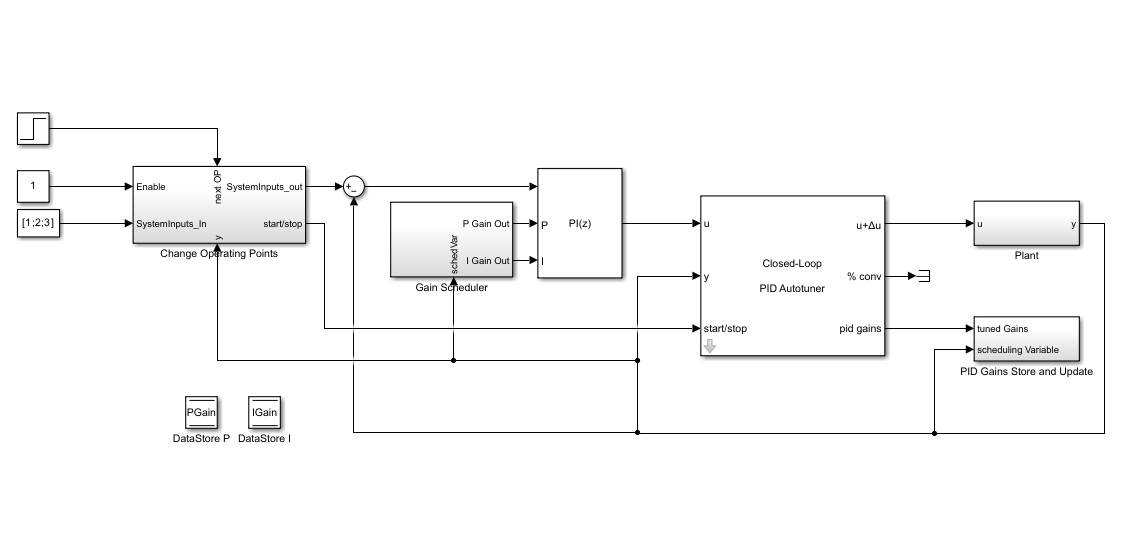
Typically, tuning a gain-scheduled controller is a complex process. It requires you to run multiple simulations for tuning at each operating point and provide a logic to store PID gains at that operating point. Using this block, along with the Change Operating Points and PID Gains Store and Update blocks, helps you implement a streamlined workflow for autotuning gain-scheduled PID controllers over an operating range in a single simulation. To do so, use this workflow.
Switch between predefined or snapshot operating point data during the simulation using the Change Operating Points block.
Perform autotuning at the operating points using Closed-Loop PID Autotuner.
Store the PID gains corresponding to the operating point in an array using PID Gains Store and Update block.
Perform lookup table based gain scheduling from the array using the PID Gain Scheduler block.
On a high level, you can use these blocks to implement the gain-scheduled workflow as shown in this diagram.
Ports
Input
Specify the scheduling variable. This signal indicates where in the operating range the system is at a given time. The lookup tables use this signal to determine the value of the PID gains.
Since R2026a
Specify the second scheduling variable. This signal indicates where in the operating range the system is at a given time. The lookup tables use this signal to determine the value of the PID gains.
Dependencies
To enable this port, select Use two scheduling variables.
Breakpoint data for gain scheduling, specified as a vector.
Dependencies
To enable this port, select Use external signal.
Since R2026a
Breakpoint data for second scheduling variable, specified as a vector.
Dependencies
To enable this port, select Use external signal.
Stored PID gain array. Use this gain array along with the breakpoint data to implement lookup table based gain scheduling.
This 4-element bus signal must contain the tuned PID gains
P, I, D,
and the filter coefficient N. These values correspond
to the P, I, D,
and N parameters in the expressions given in the
Controller type parameter. This bus signal
always has four elements, even if you are not tuning a PIDN
controller.
Typically, you obtain such an array using the PID Gains Store and Update block.
Dependencies
To enable this port, set Method of obtaining
gains to Input to
block
Output
The block computes the gains using the breakpoint vector and PID gain input array. The lookup method can use interpolation, extrapolation, or the original values of the input gains.
Dependencies
To enable this port, set Controller type to a controller type that has proportional action.
The block computes the gains using the breakpoint vector and PID gain input array. The lookup method can use interpolation, extrapolation, or the original values of the input gains.
Dependencies
To enable this port, set Controller type to a controller type that has integral action.
The block computes the gains using the breakpoint vector and PID gain input array. The lookup method can use interpolation, extrapolation, or the original values of the input gains.
Dependencies
To enable this port, set Controller type to a controller type that has derivative action.
The block computes the gains using the breakpoint vector and PID gain input array. The lookup method can use interpolation, extrapolation, or the original values of the input gains.
Dependencies
To enable this port, set Controller type to a controller type that has a filtered derivative.
Parameters
Specify the type of the PID controller in your system. The controller type indicates what actions are present in the controller. The following controller types are available:
P— Proportional onlyI— Integral onlyPI— Proportional and integralPD— Proportional and derivativePDN— Proportional and derivative with derivative filterPID— Proportional, integral, and derivativePIDN— Proportional, integral, and derivative with derivative filter
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the controller type matches.
Programmatic Use
Block Parameter:
ControllerType |
| Type: string |
Values:
"P" | "I" |
"PI" | "PD" |
"PDN" | "PID" |
"PIDN" |
Default:
"PID" |
Enable this option when the gain array also contains the breakpoint data. Typically, you obtain such an array when you store PID gains using the PID Gain Store and Update block with Save breakpoints in gain array enabled.
Programmatic Use
Block Parameter:
BPsInGainArray |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Since R2026a
Enable this option to use two scheduling variables for autotuning. This is helpful when you are tuning at a grid of design points based on two scheduling variables.
Specify the gain-scheduling breakpoint data.
Dependencies
To enable this parameter, disable Breakpoints saved in gain array.
Programmatic Use
Block Parameter:
GainArrayBreakpoints |
| Type: string |
| Values: vector of at least two elements |
Default:
"[1 2 3]" |
Since R2026a
Specify the gain-scheduling breakpoint data.
Dependencies
To enable this parameter, disable Breakpoints saved in gain array.
Programmatic Use
Block Parameter:
GainArrayBreakpoints2 |
| Type: string |
| Values: vector of at least two elements |
Default:
"[1 2 3 4]" |
Specify breakpoints from the block input port.
Dependencies
To enable this parameter, disable Breakpoints saved in gain array.
Programmatic Use
Block Parameter:
UseExternalBreakpoints |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Specify the method of obtaining gains.
Data store memory— Use Data Store Memory blocks to read the gains. To do so, use the same name as the data store name in the Data Store Memory blocks created using the PID Gains Store and Update block.Goto/from— Use a From block tag to read the gains. To specify the tag name, use the Parameter Name parameter for each gain. You can specify these Goto tags created using the PID Gain Scheduler block to read and lookup the gains.Input to block— Use the PID Gains input port. You can feed the output signal of the PID Gain Scheduler block to this input.
Programmatic Use
Block Parameter:
GainSourceMethod |
| Type: string |
Values:
"Data store memory" |
"Goto/from" | "Input to
block" |
Default:
"Data store memory" |
Specify the name of the data store or goto tag from which this block reads the proportional gain parameter data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has proportional action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsPParamName |
| Type: string |
Default:
"PGain" |
Specify the name of the data store or goto tag from which this block reads the integral gain parameter data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has integral action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsIParamName |
| Type: string |
Default:
"IGain" |
Specify the name of the data store or goto tag from which this block reads the derivative gain parameter data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has derivative action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsDParamName |
| Type: string |
Default:
"DGain" |
Specify the name of the data store or goto tag from which this block reads the filter gain parameter data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has a filtered derivative.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsNParamName |
| Type: string |
Default:
"NGain" |
Specify the floating-point precision based on simulation environment or hardware requirements.
Programmatic Use
Block Parameter:
BlockDataType |
| Type: string |
Values:
"Double" | "Single"
|
Default:
"Double" |
The block computes output by applying the lookup method you select to the input vectors of breakpoint data (Breakpoints) and table data (PID Gains). For details, see How the Block Generates Output.
Dependencies
To enable this port, set Controller type to a controller type that has proportional action.
Programmatic Use
Block Parameter:
PGainLookUpMeth |
| Type: string |
Values:
"Interpolation-Use End Values" |
"Interpolation-Extrapolation" | "Use
Input Nearest" | "Use Input Below"
| "Input to block" |
Default:
"Use Input Above" |
The block computes output by applying the lookup method you select to the input vectors of breakpoint data (Breakpoints) and table data (PID Gains). For details, see How the Block Generates Output.
Dependencies
To enable this port, set Controller type to a controller type that has integral action.
Programmatic Use
Block Parameter:
IGainLookUpMeth |
| Type: string |
Values:
"Interpolation-Use End Values" |
"Interpolation-Extrapolation" | "Use
Input Nearest" | "Use Input Below"
| "Input to block" |
Default:
"Use Input Above" |
The block computes output by applying the lookup method you select to the input vectors of breakpoint data (Breakpoints) and table data (PID Gains). For details, see How the Block Generates Output.
Dependencies
To enable this port, set Controller type to a controller type that has derivative action.
Programmatic Use
Block Parameter:
DGainLookUpMeth |
| Type: string |
Values:
"Interpolation-Use End Values" |
"Interpolation-Extrapolation" | "Use
Input Nearest" | "Use Input Below"
| "Input to block" |
Default:
"Use Input Above" |
The block computes output by applying the lookup method you select to the input vectors of breakpoint data (Breakpoints) and table data (PID Gains). For details, see How the Block Generates Output.
Dependencies
To enable this port, set Controller type to a controller type that has a filtered derivative.
Programmatic Use
Block Parameter:
NGainLookUpMeth |
| Type: string |
Values:
"Interpolation-Use End Values" |
"Interpolation-Extrapolation" | "Use
Input Nearest" | "Use Input Below"
| "Input to block" |
Default:
"Use Input Above" |
When you select this check box, overflows saturate to the maximum or minimum value that the data type can represent. Otherwise, overflows wrap.
When you select this check box, saturation applies to every internal operation on the block, not just the output or result. In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
Block Parameter:
DoSatur |
| Type: string |
Values:
"off" | "on" |
Default:
"off" |
Select this parameter to prevent the fixed-point tools from overriding the Output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
Block Parameter:
LockScale |
| Type: string |
Values:
"off" | "on" |
Default:
"off" |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Block parameters always round to the nearest representable value. To control the rounding of a block parameter, enter an expression using a MATLAB® rounding function into the mask field.
Programmatic Use
Block Parameter:
RndMeth |
| Type: character vector |
Values:
"Ceiling" | "Convergent" |
"Floor" | "Nearest" |
"Round" | "Simplest" |
"Zero" |
Default:
"Floor" |
More About
The block uses the input values to generate output using the method you select for Lookup Method:
| Lookup Method | Block Action |
|---|---|
Interpolation-Extrapolation
| Performs linear interpolation and extrapolation of the inputs.
Note If you select this lookup method, Simulink® Coder™ software cannot generate code for this block. |
Interpolation-Use End Values (default) | Performs linear interpolation but does not extrapolate outside the end points of the breakpoint data. Instead, the block uses the end values. |
Use Input Nearest
| Finds the element in Breakpoints nearest the current input. The corresponding element in PID Gains is the output. |
Use Input Below
| Finds the element in Breakpoints nearest and below the current input. The corresponding element in PID Gains is the output. If there is no element in Breakpoints below the current input, the block finds the nearest element. |
Use Input Above
| Finds the element in Breakpoints nearest and above the current input. The corresponding element in PID Gains is the output. If there is no element in Breakpoints above the current input, the block finds the nearest element. |
Note
The Use Input Nearest, Use Input Below,
and Use Input Above methods perform the same action when the
input scheduling Variable matches a breakpoint
value.
For more information about dynamic lookup tables, see Lookup Table Dynamic.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2023bYou can now use the Gain-Scheduled PID Autotuner, PID Gain Scheduler, PID Gains Store and Update blocks to automatically tune gains with two scheduling variables. This is useful when tuning over a grid of design points defined by multiple operating conditions. To use two scheduling variables, enable Use two scheduling variables in the block parameters and specify the corresponding scheduling signals and breakpoint data.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다:
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
사이트 성능 최적화 방법
최고의 사이트 성능을 위해 중국 사이트(중국어 또는 영어)를 선택하십시오. 현재 계신 지역에서는 다른 국가의 MathWorks 사이트 방문이 최적화되지 않았습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)