Change Operating Points
라이브러리:
Simulink Control Design /
Autotuning
설명
Change Operating Points 블록을 사용하여 시뮬레이션 중에 동작점을 관리하고 전환할 수 있습니다. 다음 구성 중 하나에서 이 블록을 사용할 수 있습니다.
작업 공간에서 미리 정의된 연산 데이터를 가져와 시뮬레이션 중에 작동 범위를 전환하는 경우.
시뮬레이션 동안, 지정된 시간이나 이벤트 시점에 자동으로 스냅샷을 찍어 지정된 범위에서 동작점 데이터를 가져오는 경우. 예를 들어, 모터 모델의 경우 다음과 같이 특정 시간이나 이벤트 시점에 스냅샷을 찍을 수 있습니다.
3초, 5초 및 7초(시간 기반).
2000rpm, 5000rpm 및 8000rpm(이벤트 기반)
미리 정의된 동작점 데이터가 있는 경우 이득 스케줄링이 적용된 제어기 조정 워크플로에서 이 블록을 사용할 수 있습니다. 이 블록은 한 동작점에서 다른 동작점으로 플랜트를 이동시키는 기준 신호를 생성하는 데 도움이 됩니다. 이 블록을 사용하지 않을 경우에는 먼저 동작점의 스냅샷을 찍은 후 이득 스케줄링 워크플로에 해당 데이터를 사용하십시오.
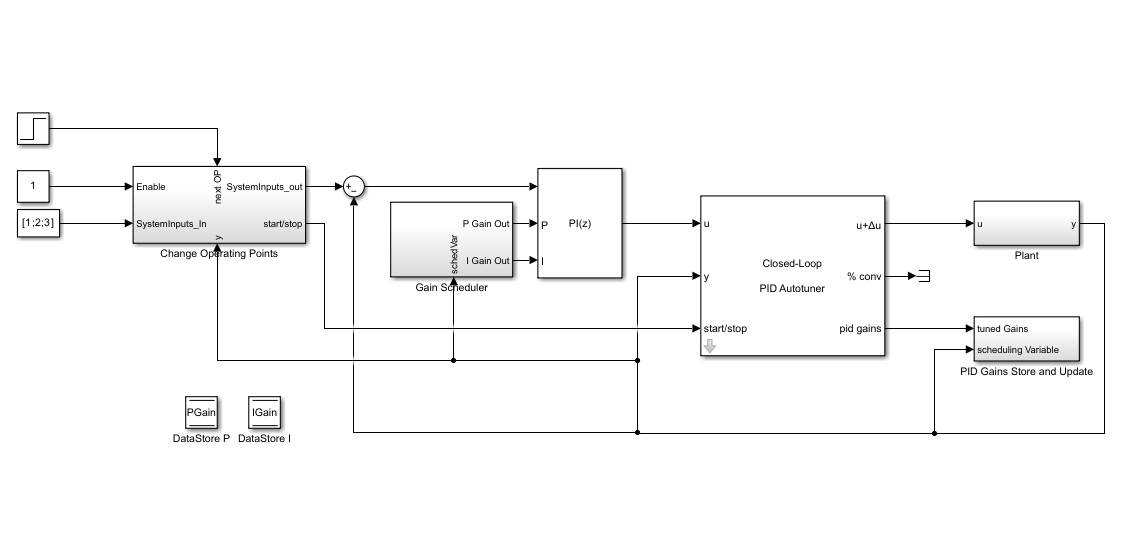
일반적으로 이득 스케줄링이 적용된 제어기를 조정하는 과정은 복잡합니다. 이를 위해서는 각 동작점에서의 조정을 위해 다중 시뮬레이션을 실행해야 하고 해당 동작점에서의 PID 이득을 저장하기 위한 로직을 제공해야 합니다. 이 블록을 PID Gains Store and Update 블록 및 PID Gain Scheduler 블록과 함께 사용하면 이득 스케줄링이 적용된 PID 제어기를 작동 범위 전체에서 단 한 번의 실행으로 자동 조정할 수 있는 매끄러운 워크플로를 구현할 수 있습니다. 그렇게 하려면 다음 워크플로를 사용하십시오.
시뮬레이션 중에 Change Operating Points 블록을 사용하여 미리 정의된 동작점 데이터 또는 스냅샷 동작점 데이터 간을 전환합니다.
Closed-Loop PID Autotuner를 사용하여 동작점에서 자동 조정을 수행합니다.
PID Gains Store and Update 블록을 사용하여 동작점에 대응하는 PID 이득을 배열에 저장합니다.
PID Gain Scheduler 블록을 사용하여 해당 배열에서 룩업 테이블 기반의 이득 스케줄링을 수행합니다.
상위 수준에서는 아래 다이어그램에 표시된 것처럼 다음 블록들을 사용하여 이득 스케줄링이 적용된 워크플로를 구현할 수 있습니다.
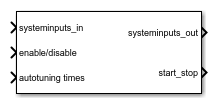
포트
입력
동작점에서 입력 레벨의 값을 지정합니다.
블록이 스냅샷 모드에서 동작할 경우 블록은 이 입력을 systeminputs_out 포트에 바로 전달합니다.
블록 동작을 활성화(1) 또는 비활성화(0)하도록 신호를 지정합니다.
자동 조정을 시작하기 위한 시간 벡터를 지정합니다. 이 벡터의 각 인덱스에 있는 값은 해당 인덱스에서의 동작점에 대한 자동 조정 시작 시간입니다. 실험 지속 시간을 지정하려면 자동 조정 시간 길이(초) 파라미터를 사용하십시오.
종속 관계
이 포트를 활성화하려면 다음 구성을 사용하십시오.
동작 모드를
동작점 가져오기로 설정합니다.자동 조정에 블록 사용을 선택합니다.
자동 조정 시작 방법을
외부 시간 벡터로 설정합니다.
다음 동작점으로 전환하기 위한 사용자 지정 로직을 지정합니다.
종속 관계
이 포트를 활성화하려면 다음 구성을 사용하십시오.
동작 모드를
동작점 가져오기로 설정합니다.천이 방법을
외부 트리거로 설정합니다.
플랜트의 출력을 이 포트에 연결합니다. 블록은 이 신호를 사용하여 시스템의 현재 작동 상태를 결정합니다.
종속 관계
이 포트를 활성화하려면 다음 구성을 사용하십시오.
동작 모드를
동작점 가져오기로 설정합니다.자동 조정에 블록 사용을 선택합니다.
자동 조정 시작 방법을
정상 상태 도달 후 시간으로 설정합니다.
자동 조정 프로세스를 활성화(1) 또는 비활성화(0)하기 위한 스칼라 플래그를 수동으로 지정하려면 이 포트를 사용합니다.
종속 관계
이 포트를 활성화하려면 다음 구성을 사용하십시오.
동작 모드를
동작점 가져오기로 설정합니다.자동 조정에 블록 사용 및 자동 조정을 위한 활성화/비활성화 포트 추가를 선택합니다.
모델의 동작점을 추출할 시간 기반 또는 이벤트 기반 스냅샷 트리거를 지정합니다.
스냅샷 모드가 시간 기반인 경우 동작점 데이터의 스냅샷을 찍으려는 시간 값을 지정합니다. 예를 들어 3초, 5초, 7초에 스냅샷을 찍으려면 벡터 [3,5,7]을 이 포트에 대한 입력값으로 사용합니다.
스냅샷 모드가 이벤트 기반인 경우 블록은 입력 신호의 상승 에지에서 동작점 데이터의 스냅샷을 찍습니다.
종속 관계
이 포트를 활성화하려면 동작 모드를 스냅샷 동작점으로 설정하고 다음 구성 중 하나를 사용하십시오.
스냅샷 모드를 시간 기반으로 설정하고 외부 소스 사용을 선택합니다.
스냅샷 모드를 이벤트 기반으로 설정합니다.
출력
시스템을 전환된 동작점으로 이동시키는 기준 신호
Closed-Loop PID Autotuner 블록을 사용하여 자동 조정 프로세스를 시작하고 중지하기 위한 신호. 생성되는 신호는 자동 조정 방법 및 정상 상태 설정과 같은 추가 파라미터에 따라 달라집니다.
종속 관계
이 포트를 활성화하려면 동작 모드를 동작점 가져오기로 설정하고 자동 조정에 블록 사용을 선택하십시오.
파라미터
동작점 가져오기 탭
동작점 데이터를 가져오기 위한 모드를 지정합니다.
동작점 가져오기— 블록 대화 상자에서 테이블을 수동으로 편집하거나OperatingPoint객체를 가져와, 미리 정의된 동작점 데이터를 지정합니다.이 모드에서는 이 블록을 사용하여 이득 스케줄링이 적용된 PID 제어기를 특정 작동 범위 전체에서 자동 조정하는 매끄러운 워크플로를 구현할 수 있습니다.
스냅샷 동작점— 시뮬레이션 동안 지정된 시간 또는 지정된 이벤트에서 동작점의 스냅샷을 찍습니다.
프로그래밍 방식 사용
블록 파라미터: OperatingMode |
| 유형: string형 |
값: "Import operating points" | "Snapshot operating points" |
디폴트 값: "Import operating points" |
동작점 데이터의 입력 방법을 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: InputMethod |
| 유형: string형 |
값: "Manually edit table" | "Automatically fill table" |
디폴트 값: "Manually Edit Table" |
모델에 포함된 입력 개수를 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 입력 방법을 수동으로 테이블 편집으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: NumSystemInputs |
| 유형: string형 |
| 값: 따옴표로 묶인 양의 스칼라 |
디폴트 값: "3" |
동작점 데이터를 가져올 작업 공간을 지정합니다. 지정된 작업 공간에는 동작점 변수의 값과 동일한 이름을 가진 OperatingPoint 객체가 있어야 합니다.
기본 작업 공간— 기본 MATLAB® 작업 공간에서 데이터를 가져옵니다.모델 작업 공간— 현재 모델 작업 공간에서 데이터를 가져옵니다.데이터 사전— Simulink® 데이터 사전에서 데이터를 가져옵니다.
그 외에 스냅샷 모드에서 블록에 의해 생성된 동작점 데이터를 가져오려면 작업 공간에 저장 버튼을 클릭하고 동작점 구조체의 이름을 지정하십시오.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 입력 방법을 자동으로 테이블 채우기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: ImportWorkspace |
| 유형: string형 |
값: "Data dictionary" | "Base workspace" | "Model workspace" |
디폴트 값: "Data dictionary" |
동작점 데이터를 읽어올 데이터 사전의 이름을 지정합니다. OperatingPoint 객체는 사전의 Other Data 섹션에 저장해야 합니다. 자세한 내용은 What Is a Data Dictionary? 항목을 참조하십시오.
종속 관계
이 파라미터를 활성화하려면 다음 파라미터를 설정하십시오.
동작 모드를
동작점 가져오기로 설정입력 방법을 자동으로 테이블 채우기로 설정
작업 공간을
데이터 사전으로 설정
프로그래밍 방식 사용
블록 파라미터: DataDictionaryName |
| 유형: string형 |
디폴트 값: "myDataDictionary.sldd" |
동작점 변수의 이름을 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 입력 방법을 자동으로 테이블 채우기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: OperatingPointVariable |
| 유형: string형 |
디폴트 값: "myOperatingPoint" |
동작점 데이터를 가져오기 위한 스냅샷 모드를 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 스냅샷 동작점으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SnapshotMode |
| 유형: string형 |
값: "Time-based" | "Event-based" |
디폴트 값: "Time-based" |
모델의 동작점을 추출할 시뮬레이션 스냅샷 시간을 지정합니다. 단일 스냅샷에는 스칼라를 사용하고 여러 개의 스냅샷에는 벡터를 사용하십시오.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 스냅샷 동작점으로, 스냅샷 모드를 시간 기반으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SnapshotTimes |
| 유형: string형 |
| 값: 따옴표로 묶인 스칼라 또는 벡터 |
디폴트 값: "[1 2 3]" |
시뮬레이션 스냅샷 시간을 블록 입력으로 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 스냅샷 동작점으로, 스냅샷 모드를 시간 기반으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SnapshotTimesExternalSource |
| 유형: string형 |
값 "off" | "on" |
디폴트 값: "off" |
샘플 시간을 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 스냅샷 동작점으로, 스냅샷 모드를 시간 기반으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SampleTime |
| 유형: string형 |
| 값: 따옴표로 묶인 양의 스칼라 | "–1" |
디폴트 값: "–1" |
동작점 데이터로, 여러 개의 테이블 요소로 지정됩니다.
입력 방법이 수동으로 테이블 편집인 경우, 테이블의 값 열을 사용하여 동작점의 인덱스, 스냅샷 시간 및 입력 레벨에 해당하는 데이터를 지정할 수 있습니다.
입력 방법이 자동으로 테이블 채우기인 경우 가져온 동작점에 따라 동작점의 값이 값에 표시됩니다.
스냅샷 모드에서 데이터를 가져온 다음 테이블 요소를 채우려면 테이블에 저장을 클릭하십시오.
종속 관계
이 테이블의 값 열에 대해 수동 데이터 입력을 활성화하려면 동작 모드를 동작점 가져오기로, 입력 방법을 수동으로 테이블 편집으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: OperatingPointTable |
| 유형: string형 |
| 값: 따옴표로 묶인 셀형 배열 |
디폴트 값: "{'Indicies','[1 2 3]';'Times (sec)','[0 1 2]';'SystemInput_1','[1 1 1]';'SystemInput_2','[2 2 2]';'SystemInput_3','[3 3 3]'}" |
블록에 의해 생성된 Simulink.Bus 객체의 이름을 지정합니다.
프로그래밍 방식 사용
블록 파라미터: BusName |
| 유형: string형 |
| 값: string형 |
디폴트 값: "scdPlantOPsBusObject" |
객체의 버스 이름을 수동으로 지정합니다.
프로그래밍 방식 사용
블록 파라미터: SpecifyBusName |
| 유형: string형 |
값 "off" | "on" |
디폴트 값: "off" |
시뮬레이션 환경 또는 하드웨어 요구 사항을 기반으로 부동소수점 정밀도를 지정합니다.
프로그래밍 방식 사용
블록 파라미터: BlockDataType |
| 유형: string형 |
값: "Double" | "Single"
|
디폴트 값: "Double" |
동작점 설정 변경 탭
이득 스케줄링이 적용된 PID 자동 조정 워크플로에 블록을 사용합니다. 이 옵션을 활성화하면 블록은 start_stop 출력 포트에서 신호를 생성합니다. Closed-Loop PID Autotuner 블록을 사용하여 자동 조정 프로세스를 시작하고 중지하려면 start_stop 신호를 사용하십시오. 생성되는 신호는 자동 조정 방법 및 정상 상태 설정과 같은 추가 파라미터에 따라 달라집니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: UseAutotuning |
| 유형: string형 |
값 "off" | "on" |
디폴트 값: "on" |
PID 자동 조정 시작 방법을 지정합니다.
외부 시간 벡터— autotuning times 입력 포트를 사용하여 시간 벡터를 지정합니다. 이 벡터의 각 인덱스에 있는 값은 해당 인덱스에서의 동작점에 대한 자동 조정 시작 시간입니다. 실험 지속 시간을 지정하려면 자동 조정 시간 길이(초) 파라미터를 사용하십시오.정상 상태 도달 후 시간— 모델 출력이 정상 상태에 도달하면 자동 조정을 시작합니다. 각 동작점의 정상 상태 기준을 정의하려면 정착 시간 상한, 정착 시간 하한 및 정착 시간 간격 파라미터를 사용하십시오.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하고 자동 조정에 블록 사용을 선택하십시오.
프로그래밍 방식 사용
블록 파라미터: AutotuningTriggerMethod |
| 유형: string형 |
값: "External time vector" | "Time after reaching steady-state" |
디폴트 값: "External time vector" |
블록에 enable autotuning 입력 포트를 추가합니다. 자동 조정 프로세스를 활성화(1) 또는 비활성화(0)하기 위한 스칼라 플래그를 수동으로 지정하려면 이 포트를 사용합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하고 자동 조정에 블록 사용을 선택하십시오.
프로그래밍 방식 사용
블록 파라미터: AddEnableDisableAutotuning |
| 유형: string형 |
값 "off" | "on" |
디폴트 값: "on" |
자동 조정 실험의 지속 시간을 지정합니다. 플랜트 주파수 응답을 올바르게 추정할 만큼 충분한 데이터를 수집하려면 알고리즘에 대해 실험을 충분히 오랫동안 실행해야 합니다. 충분한 시간 동안 실험을 실행하지 않으면 결과가 부정확할 수 있습니다. 자세한 내용은 Closed-Loop PID Autotuner 블록의 start/stop 입력 포트를 참조하십시오.
모든 동작점에 대해 동일한 시간 동안 자동 조정 실험을 실행하려면 양의 스칼라 값을 지정하십시오.
각 동작점에 대해 서로 다른 시간 동안 실험을 실행하려면 양의 값으로 구성된 벡터를 지정하십시오. 각 지속 시간 값은 벡터의 해당 인덱스에 있는 동작점에 대응됩니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하고 자동 조정에 블록 사용을 선택하십시오.
프로그래밍 방식 사용
블록 파라미터: AutotuningExperimentLength |
| 유형: string형 |
| 값: 따옴표로 묶인 양의 스칼라 또는 벡터 |
디폴트 값: "10" |
모델이 정상 상태에 도달한 후 블록이 자동 조정 프로세스 시작을 지연시킬 샘플 수를 지정합니다.
종속 관계
이 파라미터를 활성화하려면 다음 구성을 사용하십시오.
동작 모드를
동작점 가져오기로 설정합니다.자동 조정에 블록 사용을 선택합니다.
자동 조정 시작 방법을
정상 상태 도달 후 시간으로 설정합니다.
프로그래밍 방식 사용
블록 파라미터: NumAutotuningDelaySamples |
| 유형: string형 |
| 값: 따옴표로 묶인 양의 스칼라 |
디폴트 값: "2" |
동작점 천이 방법을 지정합니다.
내부 시간 벡터(동작점 테이블에서)— 동작점 데이터로 구성된 시간 벡터의 값에 따라 동작점을 변경합니다.정상 상태 도달 후 시간— 모델 출력이 해당 동작점에 대해 정의된 정상 상태 조건에 도달하면 동작점을 변경합니다.자동 조정 완료 후 시간— 해당 동작점에 대한 자동 조정 시간이 경과하면 동작점을 변경합니다.외부 트리거— next OP 블록 입력 포트에 지정된 사용자 지정 로직에 따라 동작점을 변경합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: TransitionMethod |
| 유형: string형 |
값: "Internal time vector (from operating point table)" | "Time after reaching steady-state" | "Time after completing autotuning" | "External trigger" |
디폴트 값: "Internal time vector (from operating point table)" |
한 동작점에서 다른 동작점으로 천이하기 위한 알고리즘을 지정합니다.
계단— 두 동작 레벨 간의 이동에 계단 신호를 사용합니다.램프— 두 동작 레벨 간에 일정하게 증가하거나 감소하는 신호로 램프 신호를 사용합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: ChangeOPAlgorithm |
| 유형: string형 |
값 "Step" | "Ramp" |
디폴트 값: "Step" |
입력 신호의 상승 레이트 제한을 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 동작점 알고리즘 변경을 램프로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: RampSlewUpRate |
| 유형: string형 |
| 값: 따옴표로 묶인 스칼라 또는 벡터 |
디폴트 값: "1" |
입력 신호의 하강 레이트에 대한 하한을 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 동작점 알고리즘 변경을 램프로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: RampSlewLoRate |
| 유형: string형 |
| 값: 따옴표로 묶인 스칼라 또는 벡터 |
디폴트 값: "–1" |
모델이 정상 상태에 도달한 후 다음 동작점으로 천이할 때까지 블록이 지연시킬 샘플 수를 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 천이 방법을 정상 상태 도달 후 시간으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: NumTransitionDelaySamples |
| 유형: string형 |
| 값: 따옴표로 묶인 음이 아닌 스칼라 |
디폴트 값: "2" |
자동 조정 실험이 완료된 후 다음 동작점으로 천이할 때까지 블록이 지연시킬 샘플 수를 지정합니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 천이 방법을 자동 조정 완료 후 시간으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: NumSamplesAutotuningTranstion |
| 유형: string형 |
| 값: 따옴표로 묶인 음이 아닌 스칼라 |
디폴트 값: "2" |
동작점에 대한 정착 시간과 정상 상태를 결정하는 데 사용되는 동작 값에 대한 상한을 지정합니다.
이 벡터의 각 값은 해당 인덱스에 있는 동작점에 대한 상한에 대응됩니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 천이 방법을 정상 상태 도달 후 시간으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SettlingTimeUpper |
| 유형: string형 |
| 값: 따옴표로 묶인 스칼라 또는 벡터 |
디폴트 값: "[1.1 2.1 3.1]" |
동작점에 대한 정착 시간과 정상 상태를 결정하는 데 사용되는 동작 값에 대한 하한을 지정합니다.
이 벡터의 각 값은 해당 인덱스에 있는 동작점에 대한 하한에 대응됩니다.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 천이 방법을 정상 상태 도달 후 시간으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SettlingTimeLower |
| 유형: string형 |
| 값: 따옴표로 묶인 스칼라 또는 벡터 |
디폴트 값: "[0.9 1.9 2.9]" |
동작 조건이 정상 상태로 유지되는 시간 간격을 지정합니다.
동작점마다 서로 다른 시간 간격을 지정하려면 벡터를 사용하십시오.
종속 관계
이 파라미터를 활성화하려면 동작 모드를 동작점 가져오기로, 천이 방법을 정상 상태 도달 후 시간으로 설정하십시오.
프로그래밍 방식 사용
블록 파라미터: SettlingTimeInterval |
| 유형: string형 |
| 값: 따옴표로 묶은 스칼라 또는 벡터 |
디폴트 값: "5" |
확장 기능
Change Operating Points 블록은 동작 모드가 동작점 가져오기인 경우에만 코드 생성을 지원합니다.
버전 내역
R2023b에 개발됨
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다:
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
사이트 성능 최적화 방법
최고의 사이트 성능을 위해 중국 사이트(중국어 또는 영어)를 선택하십시오. 현재 계신 지역에서는 다른 국가의 MathWorks 사이트 방문이 최적화되지 않았습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)