PointCloud2
(제거될 예정임) 포인트 클라우드 메시지에 액세스
PointCloud2 객체는 향후 릴리스에서 제거될 예정입니다. rosmessage 함수를 사용하여 ROS 메시지를 생성할 때 Dataformat 이름-값 인수를 "struct"로 지정하여 메시지 구조체 형식을 사용하십시오. rosReadXYZ , rosWriteXYZ, rosReadRGB, rosWriteRGB 함수를 포인트 클라우드 메시지와 함께 사용할 수 있습니다. 자세한 내용은 ROS 메시지 구조체 함수 항목을 참조하십시오.
설명
생성
설명
ptcloud = rosmessage('sensor_msgs/PointCloud2')는 빈 PointCloud2 객체를 만듭니다. 포인트 클라우드 데이터를 지정하기 위해 ptcloud.Data 속성을 사용합니다. 또한 rossubscriber를 사용하여 ROS 네트워크에서 포인트 클라우드 데이터 메시지를 가져올 수도 있습니다.
속성
객체 함수
readAllFieldNames | (To be removed) Get all available field names from ROS point cloud |
readField | (To be removed) Read point cloud data based on field name |
readRGB | (제거될 예정임) 포인트 클라우드 데이터에서 RGB 값 추출 |
readXYZ | (제거될 예정임) 포인트 클라우드 데이터에서 XYZ 좌표 추출 |
scatter3 | Display point cloud in scatter plot |
showdetails | (제거될 예정임) 모든 ROS 메시지 내용 표시 |
예제
포인트 클라우드 메시지 내부의 데이터에 액세스하고 시각화합니다.
샘플 ROS 메시지를 만들고 포인트 클라우드 이미지를 검사합니다. ptcloud는 샘플 ROS PointCloud2 메시지 객체입니다.
exampleHelperROSLoadMessages ptcloud
ptcloud =
ROS PointCloud2 message with properties:
PreserveStructureOnRead: 0
MessageType: 'sensor_msgs/PointCloud2'
Header: [1×1 Header]
Fields: [4×1 PointField]
Height: 480
Width: 640
IsBigendian: 0
PointStep: 32
RowStep: 20480
Data: [9830400×1 uint8]
IsDense: 0
Use showdetails to show the contents of the message
readXYZ와 readRGB를 사용하여 포인트 클라우드에서 RGB 정보와 xyz 좌표를 가져옵니다.
xyz = readXYZ(ptcloud); rgb = readRGB(ptcloud);
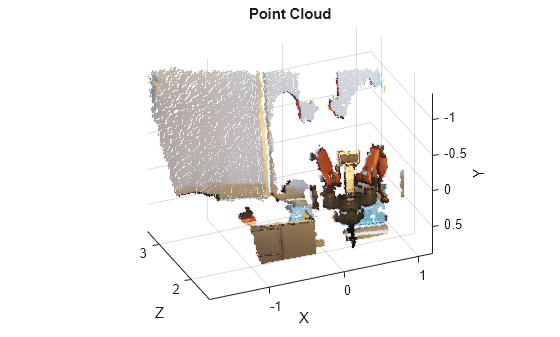
scatter3을 사용하여 Figure에 포인트 클라우드를 표시합니다.
scatter3(ptcloud)
ROS Toolbox 포인트 클라우드 메시지를 Computer Vision Toolbox™ pointCloud 객체로 변환합니다.
샘플 메시지를 불러옵니다.
exampleHelperROSLoadMessages
ptcloud 메시지를 pointCloud 객체로 변환합니다.
pcobj = pointCloud(readXYZ(ptcloud),'Color',uint8(255*readRGB(ptcloud)))pcobj =
pointCloud with properties:
Location: [307200×3 single]
Count: 307200
XLimits: [-1.8147 1.1945]
YLimits: [-1.3714 0.8812]
ZLimits: [1.4190 3.3410]
Color: [307200×3 uint8]
Normal: []
Intensity: []