Simulink에서 매니퓰레이터의 기하 야코비 행렬 계산
이 예제에서는 rigidBodyTree 모델을 사용하여 로봇 매니퓰레이터의 기하 야코비 행렬을 계산하는 방법을 보여줍니다. 야코비 행렬은 베이스 좌표 프레임을 기준으로 엔드 이펙터 속도에 조인트-공간 속도를 매핑합니다. 이 예제에서는 MATLAB®에서 로봇 모델과 로봇 컨피규레이션을 정의하고, 이를 매니퓰레이터 알고리즘 블록과 함께 사용하기 위해 Simulink®에 전달합니다.
로봇 라이브러리로부터 KUKA LBR iiwa 7 로봇을 모델링하는 rigidBodyTree 객체를 불러옵니다. homeConfiguration 함수를 사용하여 로봇의 홈 컨피규레이션 또는 홈 조인트 위치를 가져옵니다. randomConfiguration 함수를 사용하여 지정된 조인트 제한 내에 무작위 컨피규레이션을 생성합니다.
lbr = loadrobot("kukaIiwa7", DataFormat="column"); homeConfig = homeConfiguration(lbr); randomConfig = randomConfiguration(lbr);
모델을 엽니다. 필요하면 Load Robot Model 콜백 버튼을 사용하여 로봇 모델과 컨피규레이션 벡터를 다시 불러오십시오. 두 블록 모두에서 'tool0' 바디가 엔드 이펙터로 선택되어 있습니다.
open_system("get_jacobian_example.slx")
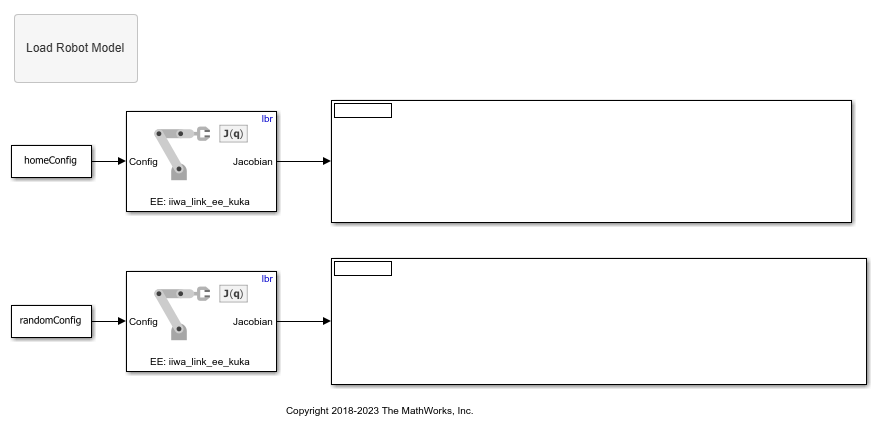
모델을 실행하여 각 컨피규레이션에 대한 야코비 행렬을 표시합니다.