Ackermann Kinematic Model
Ackermann 기구학 모델을 사용한 차륜 이동체의 모션
라이브러리:
Robotics System Toolbox /
Mobile Robot Algorithms
설명
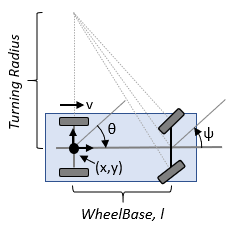
Ackermann Kinematic Model 블록은 Ackermann 조향을 사용하는 차륜 이동체 모델을 생성합니다. 이 모델은 두 차축이 거리 Wheel base만큼 떨어져 있는 이동체를 표현합니다. 이동체 상태는 요소를 4개 가진 벡터 [x y θ ψ]로 정의됩니다. 각각은 전역 xy-위치, 이동체 방향 θ, 조향각 ψ입니다. 이동체 방향과 xy 위치는 뒤 차축의 중심에서 정의됩니다. 각도는 라디안으로, 전역 위치는 미터로 지정됩니다. 이동체의 조향 입력값은 dψ/dt(단위: 초당 라디안)로 주어집니다.
예제
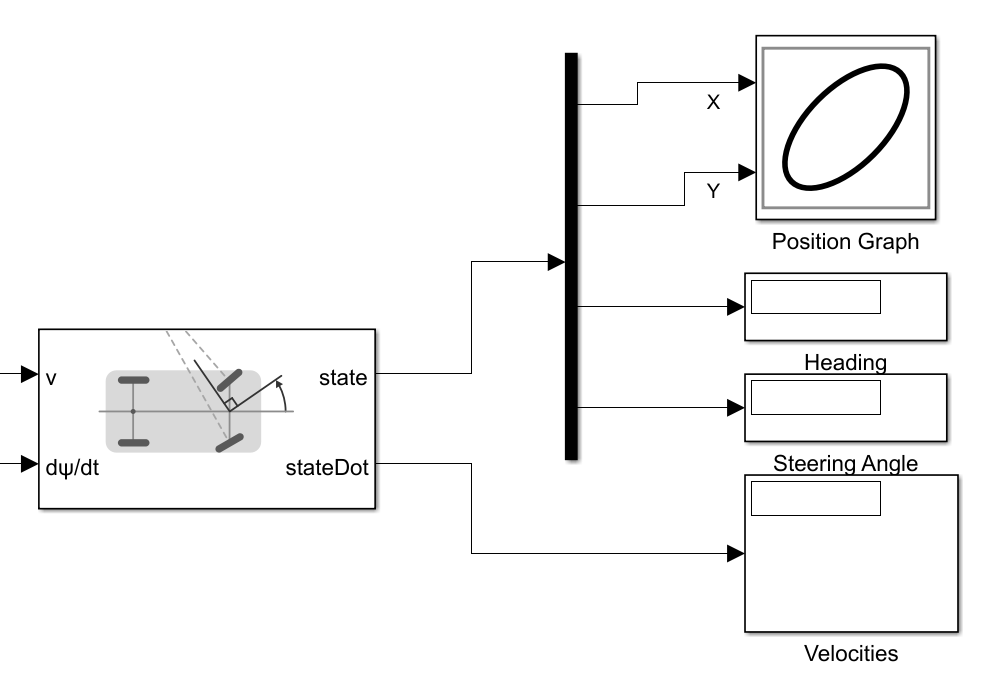
Plot Ackermann Drive Vehicle in Simulink
Plot the position of an Ackermann Kinematic Model block and change the vehicle velocity and steering angular velocity in real-time.
포트
입력
출력
파라미터
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
확장 기능
버전 내역
R2019b에 개발됨