ackermannKinematics
차륜 조향 이동체 모델
설명
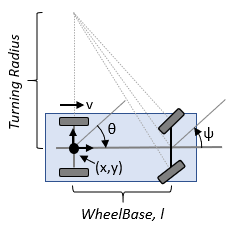
ackermannKinematics는 Ackermann 조향을 사용하는 차륜 이동체 모델을 생성합니다. 이 모델은 두 차축이 거리 WheelBase만큼 떨어져 있는 이동체를 표현합니다. 이동체 상태는 요소를 4개 가진 벡터 [x y theta psi]로 정의됩니다. 여기서 전역 xy 위치는 미터 단위로 지정됩니다. xy 위치는 뒤 차축의 중심에 있습니다. 이동체의 방향 theta와 이동체의 조향각 psi는 라디안으로 지정됩니다. 이동체 방향은 뒤 차축의 중심에서 정의됩니다. 각도는 라디안으로 주어집니다. 모델의 시간 도함수 상태를 계산하기 위해 입력 조향 명령과 현재 로봇 상태를 지정하여 derivative 함수를 사용합니다.
생성
설명
kinematicModel = ackermannKinematics
kinematicModel = ackermannKinematics(Name,Value)
속성
객체 함수
derivative | 이동체 상태의 시간 도함수 |
예제
조향각에 제약 조건이 있는 Ackermann 조향을 사용하는 이동 로봇 모델을 시뮬레이션합니다. 시뮬레이션하는 동안 모델은 조향 한도에 도달한 후 최대 조향각을 유지합니다. 조향 포화의 효과를 확인하기 위해 조향각에 대한 제약 조건이 있는 로봇과 조향 제약 조건이 없는 로봇의 궤적을 비교합니다.
모델 정의하기
Ackermann 기구학 모델을 정의합니다. 이 차륜 모델에서는 두 앞바퀴가 주어진 거리만큼 떨어져 있습니다. 두 바퀴가 동심원을 그리며 회전할 수 있도록 서로 다른 조향각을 가집니다. 회전하는 동안 앞바퀴는 조향각의 변화율을 조향 입력값으로 받습니다.
carLike = ackermannKinematics;
시뮬레이션 파라미터 설정하기
이동 로봇이 일정한 선형 속도를 따르고 일정한 조향률을 입력값으로 받도록 설정합니다. 조향 포화를 보여주기 위해 제약 조건이 있는 로봇을 장시간 시뮬레이션합니다.
velo = 5; % Constant linear velocity psidot = 1; % Constant left steering rate % Define the total time and sample rate sampleTime = 0.05; % Sample time [s] timeEnd1 = 1.5; % Simulation end time for unconstrained robot timeEnd2 = 10; % Simulation end time for constrained robot tVec1 = 0:sampleTime:timeEnd1; % Time array for unconstrained robot tVec2 = 0:sampleTime:timeEnd2; % Time array for constrained robot initPose = [0;0;0;0]; % Initial pose (x y theta phi)
ODE 솔버에 대한 Options 구조체 생성하기
이 예제에서는 ODE 솔버에 options 구조체를 인수로 전달합니다. options 구조체는 조향각 한도에 대한 정보를 포함합니다. options 구조체를 만들기 위해 odeset의 Events 옵션과 생성된 이벤트 함수 detectSteeringSaturation을 사용합니다. detectSteeringSaturation은 최대 조향각을 45도로 설정합니다.
detectSteeringSaturation을 정의하는 방법에 대한 설명은 이 예제의 끝에 있는 이벤트 함수 정의하기를 참조하십시오.
options = odeset('Events',@detectSteeringSaturation);ODE 솔버를 사용하여 모델 시뮬레이션하기
다음으로 derivative 함수와 ODE 솔버 ode45를 사용하여 모델을 풀고 해를 구합니다.
% Simulate the unconstrained robot [t1,pose1] = ode45(@(t,y)derivative(carLike,y,[velo psidot]),tVec1,initPose); % Simulate the constrained robot [t2,pose2,te,ye,ie] = ode45(@(t,y)derivative(carLike,y,[velo psidot]),tVec2,initPose,options);
조향 포화 검출하기
모델은 조향 한도에 도달하면 이벤트의 타임스탬프를 등록합니다. 한도에 도달하는 데 걸린 시간은 te에 저장됩니다.
if te < timeEnd2 str1 = "Steering angle limit was reached at "; str2 = " seconds"; comp = str1 + te + str2; disp(comp) end
Steering angle limit was reached at 0.785 seconds
제약 조건이 있는 로봇을 새로운 초기 조건으로 시뮬레이션하기
이제 제약 있는 로봇의 적분 종료 전 상태를 두 번째 시뮬레이션의 초기 조건으로 사용합니다. 입력 벡터가 조향 포화를 나타내도록 수정합니다. 즉, 조향률을 0으로 설정합니다.
saturatedPsiDot = 0; % Steering rate after saturation cmds = [velo saturatedPsiDot]; % Command vector tVec3 = te:sampleTime:timeEnd2; % Time vector pose3 = pose2(length(pose2),:); [t3,pose3,te3,ye3,ie3] = ode45(@(t,y)derivative(carLike,y,cmds),tVec3,pose3,options);
결과 플로팅하기
plot과 pose에 저장된 데이터를 사용하여 로봇의 궤적을 플로팅합니다.
figure(1) plot(pose1(:,1),pose1(:,2),LineWidth=2) hold on plot([pose2(:,1); pose3(:,1)],[pose2(:,2);pose3(:,2)]) title("Trajectory X-Y") xlabel("X") ylabel("Y") legend("Unconstrained Robot","Constrained Robot",Location="northwest") axis equal

제약 조건이 없는 로봇은 곡률 반경이 점점 줄어드는 나선 궤적을 따라가고, 제약 조건이 있는 로봇은 조향 한도에 도달한 후 곡률 반경이 일정한 원형 궤적을 따라갑니다.
이벤트 함수 정의하기
4번째 상태인 theta가 최대 조향각과 같을 때 적분이 종료되도록 이벤트 함수를 설정합니다.
function [state,isterminal,direction] = detectSteeringSaturation(t,y) maxSteerAngle = 0.785; % Maximum steering angle (pi/4 radians) state(4) = (y(4) - maxSteerAngle); % Saturation event occurs when the 4th state, theta, is equal to the max steering angle isterminal(4) = 1; % Integration is terminated when event occurs direction(4) = 0; % Bidirectional termination end
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.