Bicycle Kinematic Model
자전거 기구학 모델을 사용하여 차륜 이동체의 모션 계산
라이브러리:
Robotics System Toolbox /
Mobile Robot Algorithms
설명
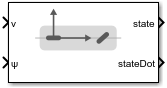
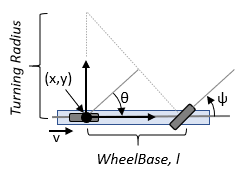
Bicycle Kinematic Model 블록은 단순한 차륜 이동체 동역학을 시뮬레이션하는 자전거 이동체 모델을 만듭니다. 이 모델은 두 개의 차축이 있고 두 차축 사이의 길이가 Wheel base로 정의된 이동체를 표현합니다. 앞바퀴는 조향각 psi만큼 회전할 수 있습니다. 이동체 방향 theta는 뒤 차축의 중심에서 정의됩니다.
예제
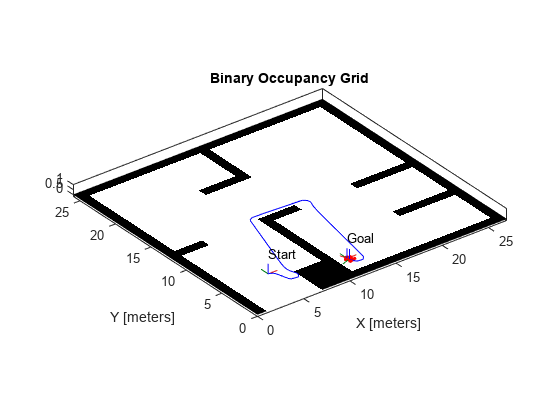
Simulink에서 자전거 로봇의 경로 계획하기
PRM(확률적 로드맵) 계획과 Pure Pursuit 제어를 사용하여 Simulink®에서 자전거 로봇으로 장애물 없는 경로를 실행합니다.
포트
입력
출력
파라미터
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
확장 기능
버전 내역
R2019b에 개발됨