imregister
명암 기반 영상 정합
구문
설명
moving_reg = imregister(moving,fixed,transformType,optimizer,metric)fixed와 정합되도록 2차원 또는 3차원 회색조 영상 moving을 변환합니다. transformType은 수행할 변환 유형을 정의합니다. metric은 최적화할 영상 간 유사성의 정량적 측정을 정의합니다. optimizer는 메트릭 최적화 방법을 나타냅니다. 이 함수는 정합된 영상 moving_reg를 반환합니다.
[은 공간 참조 영상 moving_reg,R_reg] = imregister(moving,Rmoving,fixed,Rfixed,transformType,optimizer,metric)moving이 공간 참조 영상 fixed와 함께 정합되도록 변환합니다. Rmoving과 Rfixed는 세계 좌표상의 제한값과 moving 및 fixed의 해상도를 설명하는 공간 참조 객체입니다.
___ = imregister(___,는 이름-값 쌍 인수를 하나 이상 추가 옵션으로 지정합니다.Name,Value)
예제
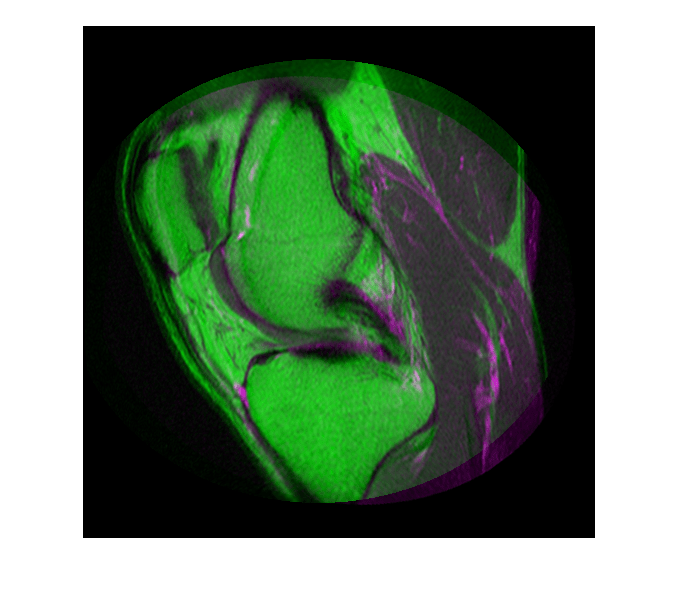
두 개의 영상을 읽어 들입니다. 이 예제에서는 무릎 MRI(자기공명영상) 영상 두 개를 사용합니다. 고정 영상은 스핀 에코 영상이고, 이동 영상은 반전 회복(inversion recovery) 기법이 사용된 스핀 에코 영상입니다. 두 개의 시상면 단층은 같은 시간에 수집했지만 약간 정렬되지 않았습니다.
fixed = dicomread("knee1.dcm"); moving = dicomread("knee2.dcm");
정렬되지 않은 영상을 표시합니다.
imshowpair(fixed,moving,"Scaling","joint")
두 영상이 서로 다른 센서에서 획득된 것이므로 모달리티(촬영 장치)를 "multimodal"로 지정해서 최적화 객체와 메트릭 객체를 생성합니다.
[optimizer,metric] = imregconfig("multimodal")optimizer =
registration.optimizer.OnePlusOneEvolutionary
Properties:
GrowthFactor: 1.050000e+00
Epsilon: 1.500000e-06
InitialRadius: 6.250000e-03
MaximumIterations: 100
metric =
registration.metric.MattesMutualInformation
Properties:
NumberOfSpatialSamples: 500
NumberOfHistogramBins: 50
UseAllPixels: 1
문제가 전역 최댓값에 수렴하도록 하고 추가 반복을 허용하도록 최적화 객체의 속성을 조정합니다.
optimizer.InitialRadius = 0.009; optimizer.Epsilon = 1.5e-4; optimizer.GrowthFactor = 1.01; optimizer.MaximumIterations = 300;
정합을 수행합니다.
movingRegistered = imregister(moving,fixed,"affine",optimizer,metric);정합된 영상을 봅니다.
imshowpair(fixed,movingRegistered,"Scaling","joint")

입력 인수
이름-값 인수
출력 인수
팁
imregtform과imregister는 동일한 기본 정합 알고리즘을 사용합니다.imregister는moving을 리샘플링하는 추가 단계를 수행하여imregtform으로 계산된 기하 변환 추정값에서 정합된 출력 영상을 생성합니다.moving과fixed를 연결시키는 기하 변환을 원하는 경우imregtform을 사용하십시오. 정합된 출력 영상을 얻으려면imregister를 사용하십시오.imregister를 호출하기 전에imregconfig함수를 사용하여optimizer와metric을 생성하십시오. 최적화 기반 영상 정합에서 만족할 만한 결과를 얻으려면 일반적으로 정합하는 영상 쌍의 최적화 객체 설정 또는 메트릭 객체 설정을 수정해야 합니다.imregconfig함수가 디폴트 구성을 제공하지만 이는 설정의 시작점으로만 간주되어야 합니다. 예를 들어, 최적화 객체에서 반복 횟수를 늘리거나 최적화 객체의 스텝 크기를 줄이거나 확률적 메트릭 값의 샘플 수를 변경하면, 성능이 저하되는 대신 정합이 어느 정도 개선됩니다. 수정할 수 있는 여러 파라미터에 대한 자세한 내용은imregconfig의 출력값을 참조하십시오.영상 간의 공간적 스케일링 차이가 10%를 넘으면 영상을 정합하기 전에
imresize를 사용하여 크기를 조정하십시오.imshowpair또는imfuse를 사용하여 정합 결과를 시각화하십시오.imregister를 자동화된 워크플로에서 사용하여 여러 영상을 정합할 수 있습니다.정합할 영상에 대한 공간 참조 정보가 있는 경우, 공간 참조 객체를 사용하여
imregister에 정보를 지정하십시오. 이렇게 하면 스케일링 차이가 감안될 수 있기 때문에imregister가 더 빠르게 더 나은 결과로 수렴됩니다.
버전 내역
R2012a에 개발됨참고 항목
앱
함수
imregconfig|imregcorr|imregtform|imwarp|imshowpair|imfuse|imregicp(Medical Imaging Toolbox)