이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
비전 데이터와 라이다 데이터를 사용한 지도작성 및 위치추정
SLAM(동시적 위치추정 및 지도작성) 알고리즘을 사용하여 에고 차량의 자세를 추정하면서 동시에 환경의 맵을 작성합니다. SLAM 알고리즘은 시각적 데이터 또는 포인트 클라우드 데이터와 함께 사용할 수 있습니다. 카메라 이미지 데이터를 사용한 시각적 SLAM 구현에 대한 자세한 내용은 Implement Visual SLAM in MATLAB 항목과 Develop Visual SLAM Algorithm Using Unreal Engine Simulation 항목을 참조하십시오. 라이다 데이터를 사용한 포인트 클라우드 SLAM 구현에 대한 자세한 내용은 Implement Point Cloud SLAM in MATLAB 항목과 Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment 항목을 참조하십시오.
IMU(관성 측정 장치)와 GPS(위성 측위 시스템) 같은 센서의 측정값을 사용하여 시각적 데이터 또는 라이다 데이터에 기반한 맵 작성 프로세스를 개선할 수 있습니다. 이에 대한 예제는 Build a Map from Lidar Data 항목을 참조하십시오.
알려진 맵이 있는 환경에서는 맵 좌표 프레임 원점을 기준으로 에고 차량의 자세를 추정하여 위치추정을 수행할 수 있습니다. 알려진 시각적 맵을 사용한 위치추정에 대한 예제는 Visual Localization in a Parking Lot 항목을 참조하십시오. 알려진 포인트 클라우드 맵을 사용한 위치추정에 대한 예제는 Lidar Localization with Unreal Engine Simulation 항목을 참조하십시오.
알려진 맵이 없는 환경에서는 시각 데이터와 IMU 데이터를 융합해 시각-관성 오도메트리를 사용하여 출발 자세를 기준으로 에고 차량의 자세를 추정할 수 있습니다. 이에 대한 예제는 Visual-Inertial Odometry Using Synthetic Data 항목을 참조하십시오.
주차장에서 빈 주차 공간을 검출하기 위한 지도작성 및 위치 알고리즘의 응용 사례는 Perception-Based Parking Spot Detection Using Unreal Engine Simulation 항목을 참조하십시오.
함수
도움말 항목
- Rotations, Orientations, and Quaternions for Automated Driving
Quaternions are four-part hypercomplex numbers that are used to describe three-dimensional rotations and orientations. Learn how to use them for automated driving applications.
- Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
- Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
추천 예제

Lidar Localization with Unreal Engine Simulation
Develop and evaluate a lidar localization algorithm using synthetic lidar data from the Unreal Engine® simulation environment.

Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from a parking lot scene in Unreal Engine environment.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine simulation environment.

Build a Map from Lidar Data
Process 3-D lidar sensor data to progressively build a map, with assistance from inertial measurement unit (IMU) readings.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.

Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.

Motion Compensation in 3-D Lidar Point Clouds Using Sensor Fusion
Compensate point cloud distortion due to ego-vehicle motion by fusing GPS and IMU data.
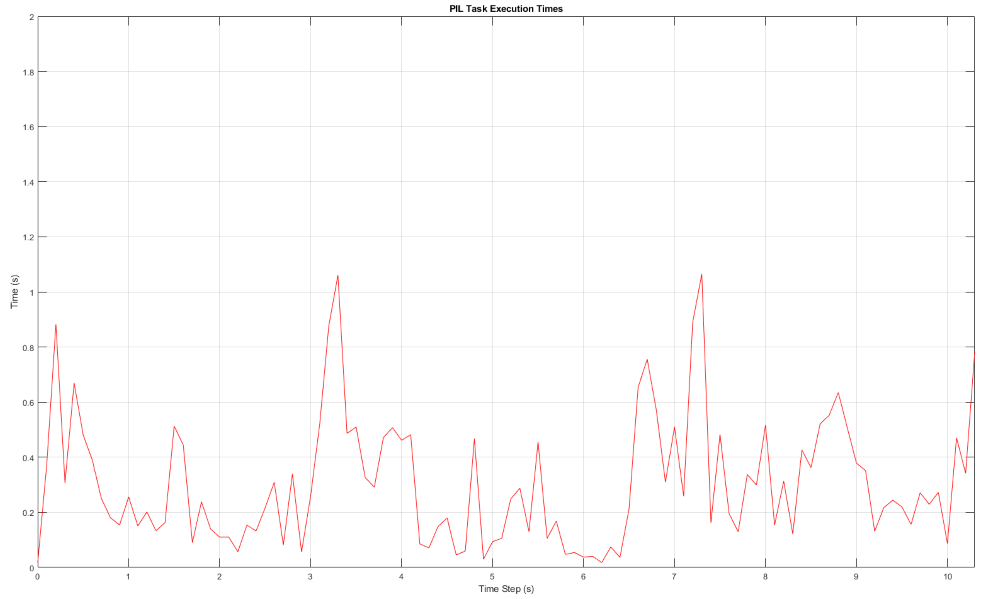
PIL Verification of Generated Code for Map Creation Using Lidar SLAM
Design a lidar SLAM algorithm for map creation, generate embedded code of the algorithm, and verify it using processor-in-the-loop (PIL) simulation on NVIDIA® Jetson™ hardware.

Build a Map with Lidar Odometry and Mapping (LOAM) Using Unreal Engine Simulation
Build a map with the lidar odometry and mapping (LOAM) [1] algorithm by using synthetic lidar data from the Unreal Engine® simulation environment. In this example, you learn how to:

Build Occupancy Map from 3-D Lidar Data Using SLAM
Build a 2-D Occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm.

Build Map and Localize Using Segment Matching
Build a map with lidar data and localize the position of a vehicle on the map using
SegMatch, a place recognition algorithm based on segment
matching.

Visual-Inertial Odometry Using Synthetic Data
Estimate the position and orientation of a vehicle by using an inertial measurement unit (IMU) and a monocular camera.

Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) using generated code on an NVIDIA GPU.