eulerd
쿼터니언을 오일러 각(단위: 도)으로 변환
설명
eulerAngles = eulerd(quat,rotationSequence,rotationType)quat를 오일러 각(단위: 도)으로 구성된 N×3 행렬로 변환합니다.
예제
입력 인수
오일러 각으로 변환할 쿼터니언으로, quaternion 객체 또는 임의 차원의 quaternion 객체 배열로 지정됩니다.
오일러 각 표현의 회전 시퀀스로, 다음 값 중 하나로 지정됩니다.
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
회전 시퀀스는 좌표축을 중심으로 회전하는 순서를 정의합니다. 예를 들어 회전 시퀀스를 "YZX"로 지정할 경우 다음과 같습니다.
첫 번째 회전은 y축을 중심으로 합니다.
두 번째 회전은 새로운 z축을 중심으로 합니다.
세 번째 회전은 새로운 x축을 중심으로 합니다.
데이터형: char | string
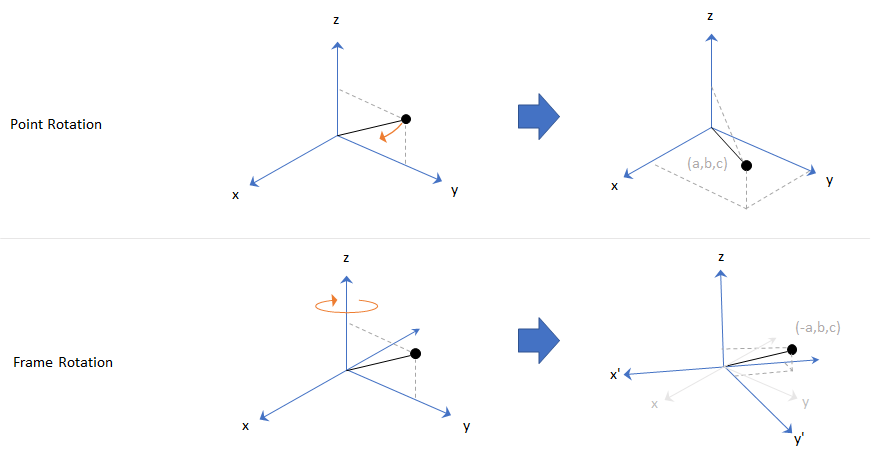
회전 유형으로, "point" 또는 "frame"으로 지정됩니다.
점 회전에서 프레임은 정적이며 점이 움직입니다. 프레임 회전에서 점은 정적이며 프레임이 움직입니다. 점 회전과 프레임 회전은 동일한 각변위를 정의하지만 방향은 반대입니다.
데이터형: char | string
출력 인수
확장 기능
버전 내역
R2020a에 개발됨