sumblk
이름 기반 상호 연결을 위한 합산점
설명
S = sumblk(formula,signalsize)signalsize 요소로 구성된 벡터입니다.sumblk는 formula의 신호 이름을 벡터 확장하여 InputName과 OutputName 속성을 설정합니다.
예제
다음 그림과 같은 합산점을 만듭니다. 모든 신호는 스칼라 값입니다.
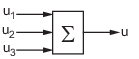
이 합산점의 식은 u = u1 + u2 + u3입니다. 이 식을 sumblk와 함께 사용하여 합산점을 만드십시오.
S = sumblk('u = u1 + u2 + u3');S는 합 u = u1 + u2 + u3을 전달 함수(tf)로 표현한 것입니다. 즉, S는 3개의 입력과 1개의 출력을 갖는 정적 이득 tf이며, 이는 입력의 합과 같습니다. 전달 함수 S는 식에서 입력 이름과 출력 이름을 얻습니다.
S.OutputName
ans = 1×1 cell array
{'u'}
S.InputName
ans = 3×1 cell
{'u1'}
{'u2'}
{'u3'}
따라서 S를 connect 명령의 이름 기반 구문과 함께 사용하여 다음 블록 다이어그램의 시스템과 같은 합산 모델을 작성할 수 있습니다.
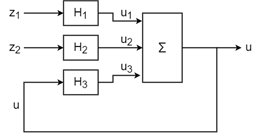
이렇게 하려면 H1, H2, H3에 대한 LTI 모델을 만들고 다이어그램에 따라 입력과 출력의 이름을 지정합니다. 이 예제에서는 전달 함수를 사용합니다.
H1 = tf(1,[1 2],"InputName","z1","OutputName","u1"); H2 = tf([1 -2],[1 1],"InputName","z2","OutputName","u2"); H3 = tf(2,[2 1],"InputName","u","OutputName","u3");
모델과 합산점을 연결하여 입력 z1과 z2, 출력 u가 있는 합산 모델을 만듭니다. connect 명령은 컴포넌트의 출력을 일치하는 이름이 있는 입력에 자동으로 연결합니다.
T = connect(H1,H2,H3,S,{"z1","z2"},{"u"});
T.InputNameans = 2×1 cell
{'z1'}
{'z2'}
T.OutputName
ans = 1×1 cell array
{'u'}
합산점 v = u - d를 만듭니다. 여기서 u, d, v는 길이가 2인 벡터 값 신호입니다. 이 합산점은 다음 다이어그램에 나와 있으며, 여기서 각 화살표는 두 개의 신호를 나타냅니다.

이 합산점은 v(1) = u(1) - d(1)과 v(2) = u(2) - d(2)를 출력합니다. sumblk를 사용하여 이 연결점을 만들려면 식과 신호 길이를 모두 지정하십시오.
S = sumblk('v = u - d',2);
size(S)Transfer function with 2 outputs and 4 inputs.
결과는 4개의 입력과 2개의 출력이 있는 전달 함수입니다. d와 u에 대해 각각 2개의 입력, v에 대해 2개의 출력입니다. sumblk는 신호 이름의 벡터 확장을 자동으로 수행하고 S.InputName과 S.OutputName에 할당합니다.
S.InputName
ans = 4×1 cell
{'u(1)'}
{'u(2)'}
{'d(1)'}
{'d(2)'}
S.OutputName
ans = 2×1 cell
{'v(1)'}
{'v(2)'}
다른 MIMO 전달 함수를 사용하는 것처럼 S를 다른 동적 시스템 모델에 연결하여 합산 모델을 작성할 수 있습니다. 예를 들어 다음 2채널 피드백 루프, 즉 다이어그램의 각 선이 두 개의 신호를 나타내는 피드백 루프를 나타내는 모델을 만든다고 가정합니다.
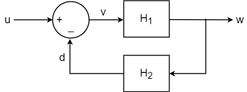
H1과 H2에 대한 2-입력, 2-출력 모델을 만들고 다이어그램에 표시된 대로 InputName과 OutputName 속성을 설정합니다. 이 예제에서는 무작위 상태공간 모델을 사용합니다.
H1 = rss(3,2,2); H1.InputName = 'v'; H1.OutputName = 'w'; H2 = rss(3,2,2); H2.InputName = 'w'; H2.OutputName = 'd';
sumblk가 S의 신호 이름을 확장하는 것처럼 동적 시스템 모델의 신호 이름은 자동으로 확장됩니다. 예를 들어 H1의 출력을 검토해 봅니다.
H1.OutputName
ans = 2×1 cell
{'w(1)'}
{'w(2)'}
connect 명령도 이 확장을 수행합니다. 따라서 다음 명령으로 합산 시스템을 조립할 수 있습니다.
T = connect(S,H1,H2,'u','w'); size(T)
State-space model with 2 outputs, 2 inputs, and 6 states.
예제 벡터 값 신호를 갖는 합산점에서 볼 수 있듯이 벡터 신호에 대한 합산점을 만들 때 기본적으로 sumblk는 사용자가 제공하는 신호 이름에 인덱스를 추가합니다. 이 벡터 확장 대신 다른 신호 이름을 지정해야 하는 경우 합산점 식에서 자리 표시자를 사용하여 이름을 지정하려는 신호를 표현하십시오. 그런 다음, 합산점을 만들 때 자리 표시자에 대입할 특정 이름을 제공하도록 signames 입력 인수를 사용하십시오.
예를 들어 다음 식을 갖는 합산점을 만듭니다.
이 식은 다음 다이어그램에 표시된 합산점입니다. 여기서 setpoint는 2개의 입력을 나타내고 e는 2개의 출력을 나타냅니다.

이 합산점을 만들려면, sumblk가 e와 setpoint를 확장하도록 허용하되 signames 인수에 제공한 특정 신호 이름에 대한 자리 표시자로 %로 시작하는 신호 이름을 사용합니다.
formula = 'e = setpoint - %y'; signames = ["alpha","q"]; S = sumblk(formula,signames);
sumblk는 자리 표시자 %y를 신호 이름 alpha와 q로 바꾸고 다른 신호 이름을 확장합니다. sumblk는 signames의 신호 개수에서 벡터 신호의 크기를 취합니다. 따라서 S의 setpoint 입력과 e 출력에는 각각 두 개의 신호가 포함됩니다.
S.InputName
ans = 4×1 cell
{'setpoint(1)'}
{'setpoint(2)'}
{'alpha' }
{'q' }
S.OutputName
ans = 2×1 cell
{'e(1)'}
{'e(2)'}
이 구문은 InputName이나 OutputName 속성이 이미 설정된 기존 모델을 연결하기 위해 합산점을 만들려는 경우에 특히 유용합니다. 예를 들어 다음과 같은 2-입력, 2-출력 상태공간 모델을 고려해 볼 수 있습니다.
A = [-0.004 0.03; 0.03 -0.19];
B = [0.3 0.2; -0.06 0];
C = [0.99 0.5; 0 0];
D = 0;
G = ss(A,B,C,D);
G.InputName = {'angle','rate'};
G.OutputName = {'current','temp'};다음과 같이 한 쌍의 기준 입력에서 G의 출력을 빼는 합산점을 만듭니다.
그러기 위해서는 식에서 이러한 신호에 대해 자리 표시자를 사용합니다. 그런 다음, G.OutputName을 signames 입력으로 사용하십시오.
S = sumblk('e = ref - %outputs',G.OutputName);
S.InputNameans = 4×1 cell
{'ref(1)' }
{'ref(2)' }
{'current'}
{'temp' }
여러 자리 표시자를 사용하여 식의 여러 요소를 바꿀 수 있습니다. sumblk는 사용자가 제공한 순서로 자리 표시자를 바꿉니다. 예를 들면 기준 신호에 ref(1)과 ref(2) 대신 특정 이름을 지정하는 것입니다.
refnames = ["refcur","reftemp"]; S = sumblk('e = %refs - %outputs',refnames,G.OutputName); S.InputName
ans = 4×1 cell
{'refcur' }
{'reftemp'}
{'current'}
{'temp' }
입력 인수
합산점 전달 함수 S의 입력 신호와 출력 신호를 연결하는 방정식으로, string형 벡터나 문자형 벡터로 지정됩니다. 예를 들어 다음 다이어그램과 같은 합산점을 고려해 볼 수 있습니다.

이 합산점을 3-입력, 1-출력 전달 함수로 나타내려면 다음 명령을 사용합니다.
formula = "e = r + d - y"; S = sumblk(formula);
벡터 값 신호의 경우 formula에서 하나 이상의 자리 표시자를 선택적으로 사용하여 sumblk가 S.InputName과 S.OutputName에 할당하는 이름을 제어할 수 있습니다. formula에 자리 표시자를 넣으려면 %로 시작하는 신호 이름을 사용하십시오. 신호 이름을 S에 할당할 때 sumblk 명령은 각 자리 표시자를 signames 인수에 제공한 이름으로 바꿉니다.
이러한 자리 표시자는 이름이 지정된 신호가 있는 기존 모델을 연결하기 위한 합산점을 만드는 데 특히 유용합니다. 예를 들어 C와 G가 각각 비어 있지 않은 InputName 속성과 OutputName 속성을 가진 동적 시스템 모델인 경우 다음 표현식을 사용해 합산점을 만들 수 있습니다.
S = sumblk("%e = r - %y",C.InputName,G.OutputName)sumblk는 %e와 %y 대신 C.InputName의 값과 G.OutputName의 값을 각각 사용합니다. C.InputName과 G.OutputName의 벡터 차원은 일치해야 합니다. sumblk는 신호 r에 동일한 차원을 할당합니다. 예제는 벡터 값 신호를 사용하여 합산점에서 개별 이름 지정하기 항목을 참조하십시오.
S의 각 입력 신호와 출력 신호에 있는 요소 개수로, 양의 정수로 지정됩니다. signalsize를 1보다 큰 값으로 설정하면 벡터 값 신호에 대해 연산을 수행하는 합산점을 지정할 수 있습니다. 예를 들어 S = sumblk("e = r - y",2)는 입력 r과 y, 출력 e가 2개의 요소를 갖는 벡터 신호인 합산점을 만듭니다. 벡터 값 신호를 갖는 합산점 항목을 참조하십시오.
formula 인수에서 자리 표시자(%로 시작하는 신호 이름)에 대입할 신호 이름으로, string형 배열이나 문자형 벡터로 구성된 셀형 배열로 지정됩니다. formula의 각 자리 표시자에 대해 하나의 signames 인수를 제공하십시오.
signames를 다음과 같이 지정하십시오.
["alpha","q"]와 같은 string형 배열.신호 이름으로 구성된 셀형 배열(예:
{'alpha','q'}).MATLAB® 작업 공간에 있는 모델의
InputName또는OutputName속성. 예를 들면 다음과 같습니다.S = sumblk("%e = r - y",C.InputName)이 명령은 출력 이름이 MATLAB 작업 공간에 있는 모델
C의 입력 이름과 동일한 연결점을 만듭니다.signames를 사용하는 방법을 보여주는 예제는 벡터 값 신호를 사용하여 합산점에서 개별 이름 지정하기 항목을 참조하십시오.자리 표시자와
signames인수를 사용하면sumblk는S신호의 벡터 길이를 설정합니다. 여러 자리 표시자를 사용하는 경우 모든signames인수의 신호 개수가 같아야 합니다.
출력 인수
버전 내역
R2008a에 개발됨