Bag 파일 기록 및 분석
ROS 토픽의 메시지 데이터는 ROS bag 파일(rosbag)이라고 불리는 로그 파일에 저장됩니다. MATLAB® 함수, 앱, Simulink® 블록을 사용하여 이러한 rosbag 파일의 ROS 데이터에 액세스하고 필터링하고 오프라인 분석을 실행할 수 있습니다. 이러한 bag은 대개 하나 이상의 ROS 토픽을 서브스크라이브하고 수신된 메시지 데이터를 효율적인 파일 구조에 저장함으로써 생성됩니다. rosbag을 사용한 작업에 대한 예제는 Work with rosbag Logfiles 항목을 참조하십시오.
ROS Toolbox는 또한 ROS 2 bag 파일(ros2bag)의 메시지 데이터에 액세스할 수 있습니다. 이러한 ros2bag 파일에서 ROS 2 데이터를 필터링하고 오프라인 분석을 실행할 수 있습니다.
카테고리
- ROS 2 Bag 파일 기록 및 분석
ROS 2 bag 파일을 가져오고 시각화하고 분석하기
- ROS Bag 파일 기록 및 분석
ROS bag 파일을 가져오고 시각화하고 분석하기
추천 예제
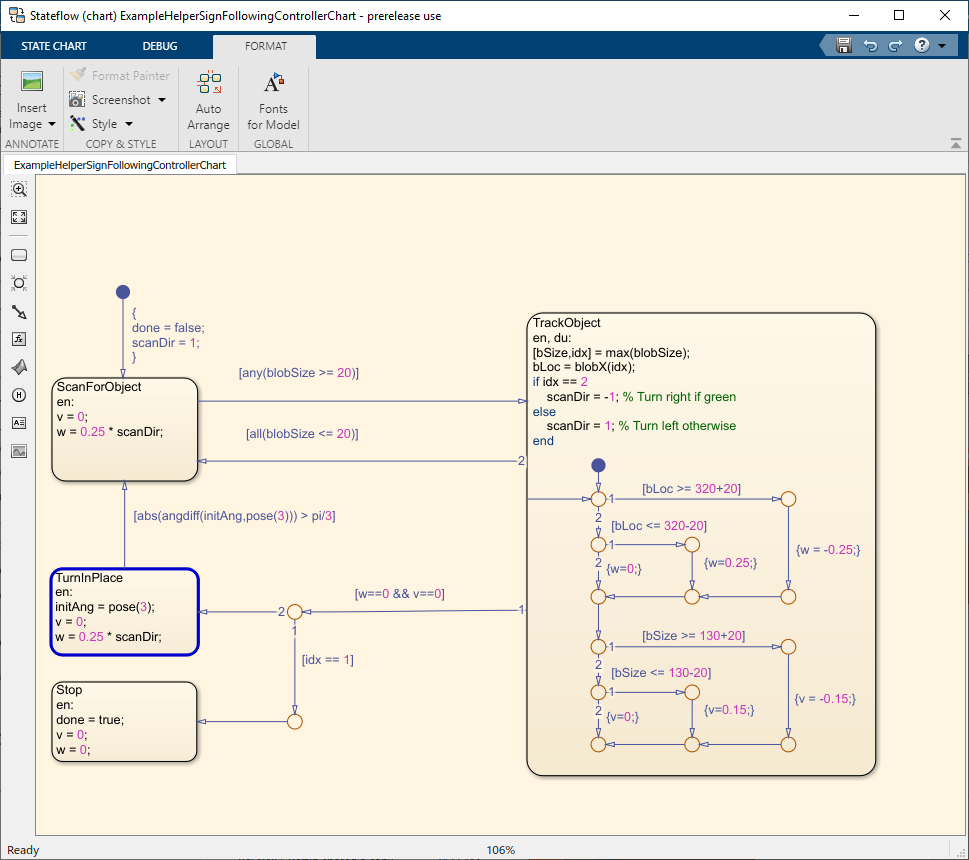
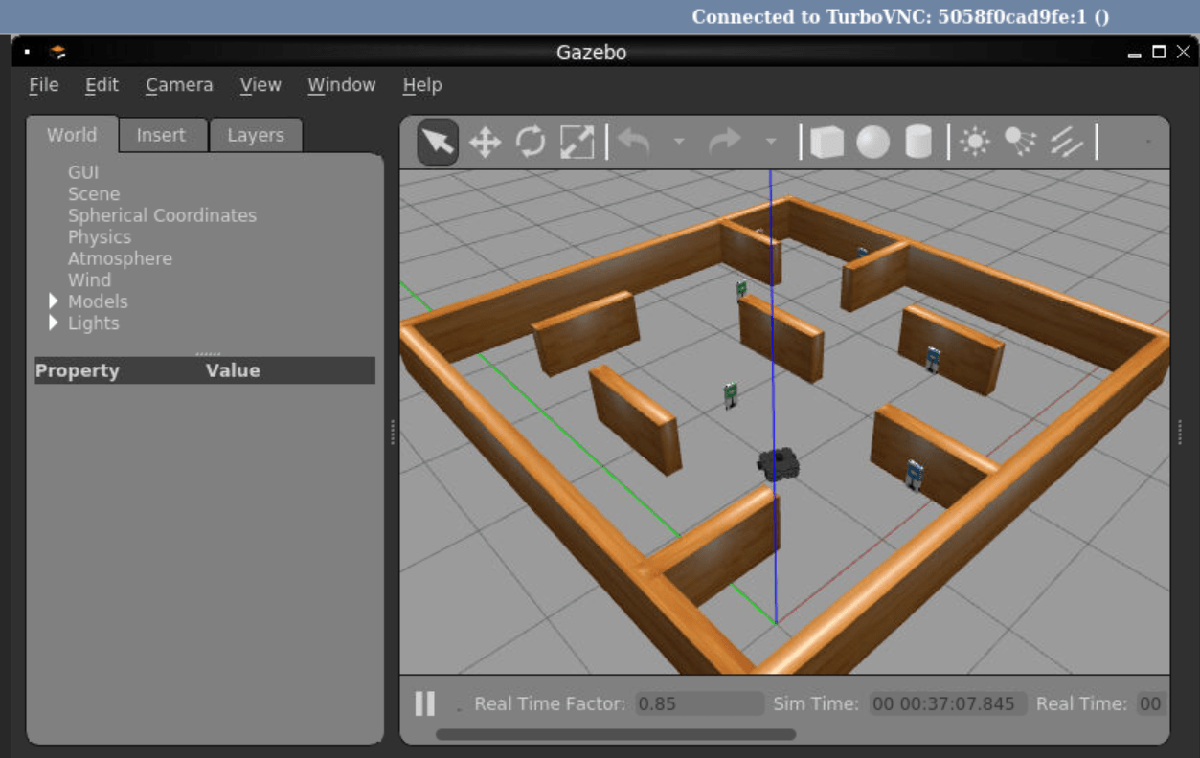
Sign-Following Robot with ROS 2 in MATLAB
Control a simulated robot running on a separate ROS-based simulator over ROS 2 network in MATLAB and generate a ROS 2 node for the control algorithm to deploy it to a remote device.
Sign-Following Robot with ROS 2 in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator over ROS 2 network.

Use ROS 2 Logger App to Save ROS 2 Messages from Simulink
Use ROS 2 Logger app to record ROS 2 messages during Simulink simulation.

Play Back Data from ROS 2 Bag Logfile in Simulink
Use the Read Data block to play back data from a ROS 2 bag file.

Read and Visualize ROS 2 bags in AWS S3 Cloud
Read and visualize ROS 2 bags stored in AWS® S3 cloud using ROS Toolbox and a customized MATLAB reference architecture.

Sign Following Robot with ROS in MATLAB
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
Sign-Following Robot with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator.

Use ROS Logger App to Save ROS Messages from Simulink
Use ROS Logger app to record ROS messages during Simulink simulation.

Play Back Data from Jackal rosbag Logfile in Simulink
Use the Read Data block to play back data from a rosbag log file recorded from a Jackal™ robot from ClearPath™ Robotics.